
5.07.2017
Gelungenes Zusammenspiel von Rover, Lander und Sensorboxen


- Demo-Mission auf dem Ätna: Helmholtz-Allianz ROBEX (Robotische Exploration unter Extrembedingungen) nach fünf Jahren abgeschlossen
- Fünf DLR-Institute entwickeln und testen Technologien für die autonome Erkundung schwer zugänglicher Gebiete
- Schwerpunkt(e): Raumfahrt; Robotik; Planetenforschung
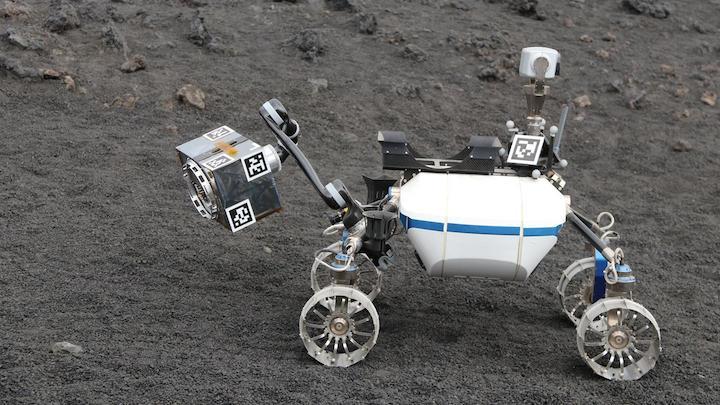
Es sieht ganz einfach aus: Der Rover fährt zielstrebig zur Landefähre, entnimmt dort mit einem Greifarm eine Sensorbox aus der Ladebucht und bringt diese zügig zum vereinbarten Ablage-Ort. Dort beginnen dann die seismischen Messungen. Alles läuft dabei ohne menschliches Eingreifen ab, denn Rover, Lander und Sensorbox arbeiten autonom und effektiv ihren Auftrag ab. Dahinter steckt jedoch die Arbeit von fünf Jahren, in denen das Team der Helmholtz-Allianz ROBEX (Robotische Exploration unter Extrembedingungen) intensiv daran gearbeitet hat, die Vision der autonomen Planetenerkundung Wirklichkeit werden zu lassen. Auf dem sizilianischen Vulkan Ätna ist dies nun in der mondähnlichen Lava-Landschaft gelungen: "Wir konnten unter Beweis stellen, dass diese Technologien auch für zukünftige Explorationsmissionen eingesetzt werden können", sagt der stellvertretende Sprecher der ROBEX-Allianz, Dr. Armin Wedler vom Deutschen Zentrum für Luft- und Raumfahrt (DLR).
Der Vulkan Ätna diente den Ingenieuren und Wissenschaftlern dabei als irdischer Ersatz für den Mond: Mit einer körnig-krümeligen Oberfläche, regelmäßigen Beben in einer Tiefe bis zu 600 Kilometern und Lava-Schichten unterschiedlichster Dicke ähnelt die Vulkanlandschaft dem Erdtrabanten. Insgesamt vier Wochen verbrachte das Team aus fünf DLR-Instituten auf dem Ätna und brachte ihre Experimente aus dem Labor in die teilweise sehr raue Wirklichkeit mit Windböen, Steinschlag und einem schnellen Wechsel zwischen Sonne und Nebel. "Wir haben uns Tag für Tag an die komplette Demonstration unseres Ziels herangearbeitet", beschreibt die wissenschaftliche ROBEX-Koordinatorin Martina Wilde vom Alfred-Wegener-Institut AWI die Testkampagne.
Selbstständigkeit auf fremden Himmelskörpern
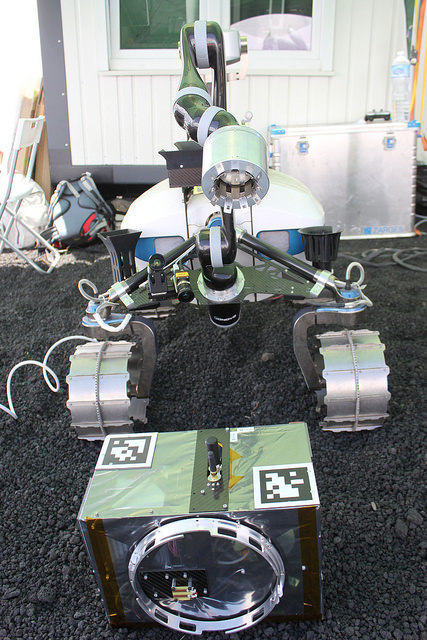
Entscheidend für den Erfolg der Mission war die Autonomie, mit der Rover, Lander und Sensorbox funktionieren sollten. "Wenn wir in schwer erreichbaren Gebieten mit extremen Umweltbedingungen wie beispielsweise auf dem Mond forschen wollen, kann der Mensch nicht in Echtzeit aus dem Kontrollzentrum oder vor Ort eingreifen", erläutert DLR-Ingenieur Armin Wedler vom Robotik- und Mechatronikzentrum des DLR. "Deshalb war unser Ziel, dass der Rover mit Kamera-Augen seine Umgebung wahrnimmt und seinen Weg selbstständig plant." Der Lander RODIN ist in diesem Szenario die stationäre Einheit, die für die Energieversorgung sowie für den Datenaustausch zwischen Kontrollzentrum, Rover und Sensorboxen zuständig ist. Mit der Installation von vier Sensorboxen, die im Inneren mit Seismometern ausgestattet sind, könnten in Zukunft erstmals die innere Struktur des Mondes und die Zusammensetzung der oberen Schichten des Regoliths bestimmt werden.
Um die ehrgeizige Mission umzusetzen, arbeiteten mehrere DLR-Institute zusammen und steuerten ihre jeweiligen Kompetenzen bei: Das Robotik- und Mechatronik-Zentrum des DLR war für den Rover zuständig, das DLR-Institut für Raumfahrtsysteme steuerte den Lander und die Sensorboxen bei, und das DLR-Institut für Faserverbundleichtbau und Adaptronik entwickelte die Struktur der Sensorboxen. Der DLR-Raumflugbetrieb ermöglichte vor Ort die Kommunikationsstruktur, und das DLR-Institut für Planetenforschung führte seismische Messungen durch.


+++

Nach fast vier Wochen Feldforschung auf dem Ätna ist der Staub allgegenwärtig: Als feine, hartnäckige Schicht legt er sich über alles, auf Ausrüstung, Transportkisten und Laptop-Tastaturen. Er dringt in die Missionscontainer ein und klebt an Händen und Beinen, die mit Sonnenmilch eingecremt sind. Jeder Schritt im schwarzen Lavaboden wirbelt Wolken von Staub auf, selbst Rover LRU-2 hat auf seinem weißen Körper reichlich schwarze Ablagerungen. Dafür sind es in den letzten Tagen deutlich weniger kleine Fliegen und Käfer, die trotz karger Landschaft den Ätna anfliegen und sich penetrant auf Jacken und Mützen der Robex-Teammitglieder setzen.
Der Ätna ist halt nicht das heimische Labor - und bleibt auch unberechenbar. Am Donnerstag stürmen Windböen mit bis zu 100 Kilometern in der Stunde über den Berg. Statt Staub wirbeln jetzt auch größere Steine auf, an Arbeit mit dem Rover ist nicht zu denken. Der Wind würde viel zu kräftig gegen Körper und Arm drücken und den Rover beschädigen. Auch der Lander wird sicher verpackt: Die Klappen der Ladebuchten werden nicht nur geschlossen, sondern sogar mit Haltegurten gesichert. Schließlich stemmen sich die Ingenieure gegen die Windböen und montieren am Lander die Schilder ab, die dem Rover bei der Annäherung zur Orientierung dienen.
Ein Rover mit Entscheidungskompetenz
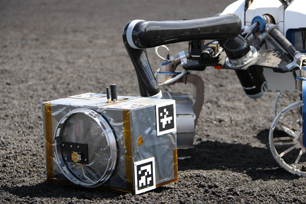

An den Tagen zuvor hatten die Robex-Teams von morgens bis abends auf dem Testgelände arbeiten können und den Rover immer wieder einzelne Sequenzen absolvieren lassen. Schritt für Schritt wurden diese einzelnen autonomen Sequenzen eingelernt, um zu einem finalen autonomen Gesamtablauf zu führen, in dem der Rover sich selbstständig seinen Weg zum Lander sucht, mit seinem Arm eine Sensorbox greift, diese zur vorbestimmten Position bringt und dort für Messungen ablegt. Dafür muss alles nahtlos zusammenspielen: Rover LRU-2 muss über seine Kamera-Sicht eine Karte erstellen, einen Weg ohne Hindernisse wählen, mit dem Lander und der Sensorbox kommunizieren, sich an den Markierungen an Lander und Box orientieren, sich ausrichten, seine Armbewegung planen und an der Box andocken, und, und, und…
Erschwerte Bedingungen auf der Erde
Immer wieder stoppt der Rover während seiner Mission. Fast schon, als würde er wie ein Mensch nachdenken. Letztendlich macht er das in seinem Computerhirn auch, denn um sicher fahren zu können, aktualisiert er mit jedem Blick seine Karte der Umgebung. Dass er dabei nicht im Labor, sondern in einer echten Umgebung auf dem Ätna fährt, macht es ihm nicht einfacher: Auf dem Mond würden beispielsweise die Sensorboxen nur wenig wiegen - auf der Erde mit ihrer Schwerkraft ist das Gewicht von drei Kilogramm schon eine ganz andere Hausnummer. Auch der irdische Wind, der immer wieder über den Rover hinwegfegt und gegen seinen Arm drückt, ringt dem Rover viel Energie ab. Auf dem windstillen Mond wäre das kein Problem.
Rund eine Stunde hält eine Batterie aus, geht es den Hügel hinauf zum Basiscamp, ist schon nach einer halben Stunde ein Batteriewechsel angesagt. Immer wieder stapft Bernhard Rebele die 80 Höhenmeter zum Basiscamp nach oben, um die nächsten aufgeladenen Batterien zu holen. Bei einer Mission auf dem Mond würde man dem Rover einfach mehr Zeit geben und langsame Bewegungen vorgeben, die deutlich weniger Energie kosten würden. Auch wenn der Ätna die perfekte Mondlandschaft für eine Testmission bietet - Schwerelosigkeit, Windstille und anderes kann er hier auf der Erde den Raumfahrtspezialisten nicht zur Verfügung stellen.
Team-Erfolg von Rover, Lander und Kontrollzentrum

Die Erfolgsmeldungen bleiben aber dennoch nicht aus: Kommandiert vom 23 Kilometer Luftlinie entfernten Kontrollzentrum in Catania meistert der Rover mehr und mehr seine Aufgaben. Mit lautem Knirschen rollen seine Metallräder über das unebene Gelände, während er den Lander ansteuert. Dabei tauschen Rover, Lander und Sensorbox immer wieder über einen Link Informationen und Daten aus. Nur wenn die Kommunikation funktioniert, kann die Mission autonom - ohne Steuerung in Echtzeit durch das Kontrollzentrum - erfolgen. Die Box selbst legt Rover LRU-2 sich mit schöner Regelmäßigkeit zum Transport auf seinen Rücken. Erreicht er sein Ziel, hebt er sie vorsichtig von seinem "Gepäckträger", ebnet mit ihr den krümeligen Lava-Untergrund und setzt sie dann mit möglichst viel Bodenkontakt ab.
Am Montag beginnen dann andere Aufgaben auf das Robex-Team: Rover LRU-2 und Lander RODIN kommen wieder in ihre Transportcontainer. Das Kontrollzentrum auf dem Ätna wird mit seinen Antennen abgebaut. Übrig bleiben dann nach kurzer Zeit nur noch die Spuren, die LRU-2 in den Lava-Untergrund gefahren hat. Und das erinnert dann doch wieder an die Fußabdrücke und Rover-Spuren, die die Apollo-Missionen auf dem Mond hinterließen.
Quelle: DLR