
11.02.2025

All-Domain Anomaly Resolution Office
US-Verteidigungsministerium
Fall: „Go Fast“
Falllösung | 6. Februar 2025
Wesentliche Fakten zum Fall
Ort: Ostküste von Florida
Datum: Januar 2015
Objekthöhe (gemeldet): Nahe der Meeresoberfläche
Objekthöhe (bewertet): 13.000 Fuß
Objektgeschwindigkeit (gemeldet): Schien sich mit hoher Geschwindigkeit zu bewegen
Objektgeschwindigkeit (bewertet): 5 mph – 92 mph
Objektform (gemeldet): Rund
Objektform (bewertet): Kugelförmig oder abgeplattetes Ellipsoid
Berichterstatter: US Navy
Sensor: Nach vorne gerichtetes Infrarot
Gemeldetes Verhalten: Bewegte sich mit hoher Geschwindigkeit nahe der Meeresoberfläche
Bewertetes Verhalten: Ein Objekt bewegte sich mit zwischen 5 und 92 mph in ungefähr 13.000 Fuß
Zusammenfassung der Ergebnisse: Hohe Sicherheit, dass das Objekt keine anomalen Leistungsmerkmale aufwies.
----
Fallübersicht
Im Januar 2015 zeichnete ein Pilot einer F/A-18F der US Navy mithilfe eines nach vorn gerichteten Infrarotsensors (FLIR) ein Objekt etwa 13.000 Fuß über dem Atlantik vor der Küste Floridas auf.
Das Video schien zu zeigen, dass sich das Objekt mit hoher Geschwindigkeit bewegte. AARO kann das Objekt nicht eindeutig identifizieren, aber es zeigte keine ungewöhnlichen Leistungsmerkmale.
Das Verteidigungsministerium veröffentlichte das „Go Fast“-Video 2020 offiziell. Es ist im FOIA-Lesesaal der Navy öffentlich zugänglich.
Wichtige Erkenntnisse
AARO geht mit hoher Sicherheit davon aus, dass sich das
Objekt nicht mit ungewöhnlicher Geschwindigkeit bewegte.
Die Analyse von AARO ergab:
• Die Höhe des Objekts betrug
ungefähr 13.000 Fuß.
• Die Geschwindigkeit des Objekts reichte von etwa
32 m/s (72 mph) bis 72 m/s (161 mph),
je nach seiner Richtung relativ zum
Wind. Unter Berücksichtigung des
Beitrags des Windes zur
Geschwindigkeit des Objekts beträgt seine ungefähre Geschwindigkeitsspanne 2
m/s (5 mph) bis 41,3 m/s (92 mph).
• Die Richtung des Objekts wich um bis zu 32° von der Windrichtung ab, obwohl die meisten
Simulationen, die während der Analyse von AARO durchgeführt wurden, deutlich geringere Unterschiede zeigten.
Das Objekt bewegte sich in keiner Simulation gegen den Wind.
Um die tatsächliche Geschwindigkeit und Flugrichtung (Kurs) des Objekts zu bestimmen, muss man den Kurs der F/A-18F kennen. AARO berechnete die Geschwindigkeit und den Kurs des Objekts relativ zum Flugzeug, da die Videoanzeige den Kurs des Flugzeugs nicht enthält. AARO berechnete die Position und Flugrichtung des Objekts für den gesamten Bereich möglicher Windrichtungen (0° - 360°), um die Unterschiede in den atmosphärischen Bedingungen zwischen der Flughöhe der F/A-18F und der Flughöhe des Objekts zu berücksichtigen. Diese umfassende Modellierung lieferte AAROs Grundlage für die Einschätzung, ob sich das Objekt mit oder gegen den Wind bewegte und ob es sich in allen möglichen Flugrichtungen anomal verhielt. AARO berücksichtigte historische Windgeschwindigkeiten und -richtungen sowohl in der Höhe des Objekts (13.000 Fuß) als auch in der Höhe des Flugzeugs (25.000 Fuß), gemessen in der Nähe der Zeit und des Ortes des Ereignisses:
• In 13.000 Fuß Höhe betrug die Windgeschwindigkeit 30,9 m/s (69 mph) aus westlicher Richtung (265°).
• In 25.000 Fuß Höhe betrug die Windgeschwindigkeit 52 m/s (116 mph) aus westlicher Richtung (255°).
Abbildung 1 zeigt den Bereich der möglichen Geschwindigkeiten des Objekts, berechnet unter Berücksichtigung der Windgeschwindigkeit in 13.000 Fuß Höhe. Dies wird als „intrinsische“ Geschwindigkeit angesehen. Eine intrinsische Geschwindigkeit von 0 m/s
zeigt an, dass sich das Objekt mit dem Wind bewegt, also mit etwa 30,9 m/s.
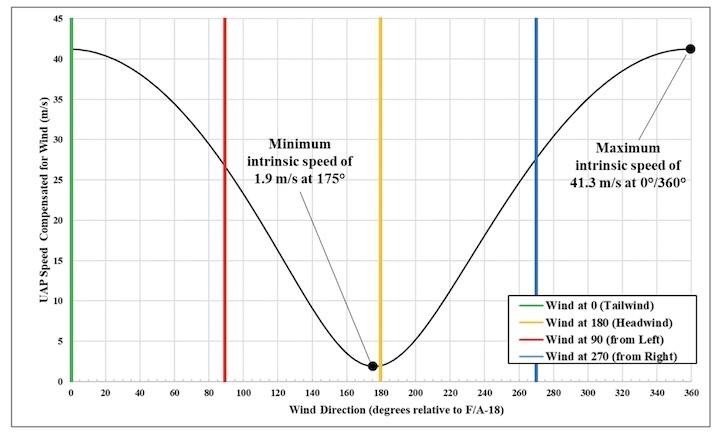
Abbildung 1: Die Y-Achse stellt die Geschwindigkeit des Objekts ohne Windeffekte dar. Die X-Achse stellt die
Windrichtung relativ zur Flugzeuggeometrie der F/A-18F dar (0° ist Gegenwind). Die Kurve stellt den
Geschwindigkeitsbereich des Objekts bei jedem Winkel dar. Die Fälle mit Rückenwind, Gegenwind und Seitenwind werden durch die farbigen Linien gekennzeichnet. Die niedrigste mögliche Geschwindigkeit des Objekts tritt bei Gegenwind auf, während die höchste bei Rückenwind auftritt.
Abbildung 2 zeigt den Bereich möglicher Richtungen des Objekts relativ zur Windrichtung in 13.000 Fuß Höhe. Eine Richtung von 0° bedeutet, dass sich das Objekt in dieselbe Richtung wie der Wind bewegt.
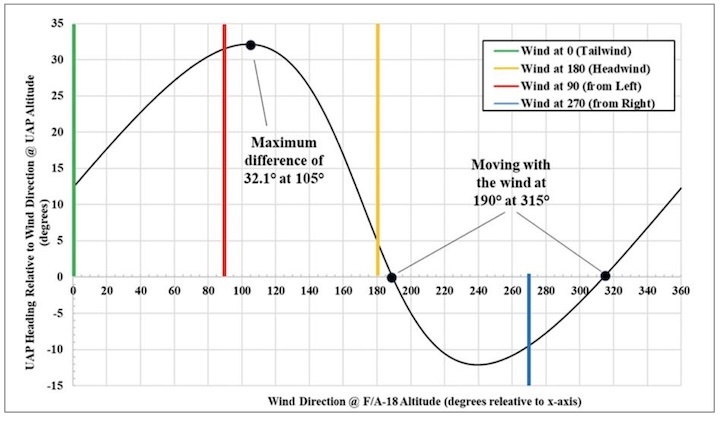
Abbildung 2: Die y-Achse stellt die Differenz zwischen der Richtung des Objekts und der Windrichtung in 13.000 Fuß Höhe dar. Die x-Achse stellt die Windrichtung relativ zur Flugzeuggeometrie der F/A-18F dar (0° ist Gegenwind). Die Kurve stellt den Bereich möglicher Richtungen des Objekts im Vergleich zum Wind dar. Rückenwind, Gegenwind und Seitenwind werden durch die farbigen Linien gekennzeichnet. Die maximale Abweichung der Flugrichtung des UAP von der Windrichtung beträgt 32,1°
Mithilfe der Abbildungen 1 und 2 können Sie die Geschwindigkeit und Richtung des Objekts im Vergleich zum Wind für jede
Bewegungsrichtung der F/A-18F relativ zur vorherrschenden Windrichtung ermitteln. Als Beispiele werden hier die
scheinbare Geschwindigkeit und Richtung des Objekts für vier Szenarien zusammengefasst: Gegenwind, Seitenwind von links, Rückenwind und Seitenwind von rechts.
1. 2. 3. 4. Gegenwind (Flugzeug fliegt gegen den Wind): Das Objekt bewegte sich 2,0 m/s (5 mph) schneller als
der Wind, mit einem Kurs von 5° ab dem Wind.
Linker Seitenwind (Wind kommt von links): Das Objekt bewegte sich 26,5 m/s (59 mph) schneller als der Wind, mit einem Kurs von 31,5° ab dem Wind.
Rückenwind (Flugzeug fliegt mit dem Wind): Das Objekt bewegte sich 41,3 m/s (92 mph) schneller als der Wind, mit einem Kurs von 12,3° ab dem Wind.
Seitenwind von rechts (Wind kommt von rechts): Das Objekt bewegte sich 27,7 m/s (62 mph) schneller als der Wind und bewegte sich 9,5° vom Wind ab. Die Leistungsmerkmale des Objekts stimmen mit den historischen Windbedingungen in jedem Szenario überein. AARO geht davon aus, dass das Objekt keine anomalen Leistungsmerkmale aufwies.
Die scheinbar hohe Geschwindigkeit des Objekts ist auf Bewegungsparallaxe zurückzuführen. Bewegungsparallaxe ist ein optischer Effekt, der einen Beobachter glauben lässt, dass sich ein stationäres oder sich langsam bewegendes Objekt viel schneller bewegt, als es tatsächlich der Fall ist, wenn man es von einem bewegten Referenzrahmen aus betrachtet.
Je schneller sich ein Beobachter relativ zu einem beobachteten Objekt bewegt, desto ausgeprägter ist dieser Effekt.
Datenqualität und Methodik
AARO analysierte das öffentlich verfügbare 34-sekündige FLIR-Video, da die Originaldatei und die dazugehörigen Metadaten nicht mehr verfügbar sind. Die Videoanzeige lieferte ausreichende Informationen, um die Höhe des Objekts und einen Bereich möglicher Geschwindigkeiten zu ermitteln.
Die Anzeige zeigte:
• Die Reichweite (Entfernung) vom FLIR-Sensor zum Ziel.
• Den Azimut (Links-Rechts-Winkel) und die Höhe (Auf-Ab-Winkel) der FLIR-Kamera.
• Die Höhe, Geschwindigkeit und Neigung (Schräglage) des Flugzeugs.
Der genaue Standort und Kurs (Kompassrichtung) des Flugzeugs während der Aufnahme sind unbekannt.
AARO konnte keine einzelne Geschwindigkeit oder Richtung für das Objekt berechnen, da die berechnete Flugbahn des Flugzeugs von seinem genauen Kurs abhängt und der berechnete Standort des Objekts vom Standort des Flugzeugs abhängt. Stattdessen berücksichtigte die Analyse alle möglichen Flugrichtungen (von 0° bis 360°), um einen Bereich möglicher Geschwindigkeiten und Kurse für das Objekt zu berechnen. Diese Berechnungen enthalten eine kleine Fehlerquote, da die Entfernung vom Sensor zum Objekt und die Sensorwinkel nur auf eine Dezimalstelle genau sind.
AARO konnte die Größe des Objekts aufgrund der niedrigen Auflösung des Videos und der Entfernung vom
Sensor zum Objekt nicht bestimmen. Die Pixelanalyse (eine Methode zur Messung der Größe eines Objekts basierend auf Pixeln im Verhältnis zu den bekannten Abmessungen eines Objekts) durch AAROs Intelligence Community-Partner
legte jedoch nahe, dass das Objekt einen Meter oder weniger groß war – vergleichbar mit einer kleinen Drohne oder einem Vogel.
Weitere technische Details zu Annahmen und Methodik finden Sie in Anhang A:
Schätzen von UAP-Standort, Geschwindigkeit und Richtung anhand von „Go Fast“-FLIR-Videodaten.
Anhang A:
Schätzung von UAP-Standort, Geschwindigkeit und Kurs anhand von „Go Fast“-FLIR-Videodaten
Februar 2025
Einführung
Im Jahr 2024 schätzte das All-domain Anomaly Resolution Office (AARO) mögliche Höhen-, Geschwindigkeits- und Kurslösungen für ein nicht identifiziertes anomales Phänomen (UAP), allgemein bekannt als „Go Fast“. Die Zusammenfassung, der allgemeine Überblick und die Schlussfolgerungen finden Sie in der AARO-Lösung zum Fall „Go Fast“ [Ref. 1]. Dieses Dokument enthält eine eingehendere Datenanalyse für alle, die sich für die Mathematik und Berechnungen interessieren, die auf das nach vorn gerichtete Infrarot-Videomaterial (FLIR) angewendet werden, das von einer AN/ASQ-Sensorkapsel an Bord der F/A-18 Super Hornet aufgenommen wurde, die das Ereignis im Januar 2015 beobachtete. AARO extrahierte manuell Daten aus einem öffentlich verfügbaren Video des „Go Fast“-Ereignisses als Ausgangsmaterial für seine Analyse. Videomaterial, das über militärische Sensoren wie das AN/ASQ gesammelt wurde, ist nicht erforderlich, um Full-Motion-Video (FMV) oder andere Produkte für die nachrichtendienstliche Überwachung und Aufklärung (ISR) zu sammeln. Daher ist es nicht dazu gedacht, nachrichtendienstliche oder andere strenge Analysen zu unterstützen. Daher enthält Videomaterial von diesen Plattformen häufig Kompressionsartefakte oder es fehlen die notwendigen Metadaten, um eine umfassende Analyse durchzuführen.
Für geeignete FMV-Produkte wird die Standardanalyse mit Softwarepaketen wie SOCET GXP [Ref. 2] durchgeführt. SOCET GXP ist eine Suite georäumlicher Analysesoftwaretools, die Satelliten- und Luftbilddaten verwenden, um Objekte und Phänomene zu messen und zu erkennen. Im Allgemeinen wird FMV verwendet, um Objekte auf der Erdoberfläche zu verfolgen, wie etwa Straßenfahrzeuge, Schiffe und Panzer. In diesen Fällen kann der Standort eines Objekts bestimmt werden, da ein FMV-Sensor weiß, wo es sich befindet und wohin es zeigt, und dann die Entfernung zum Bodenpunkt berechnen kann. Im Fall des „Go-Fast“-Videos befindet sich das Objekt nicht auf dem Boden und der Sensor-/Flugzeugstandort ist in den Metadaten nicht angegeben.
Trotz dieser Einschränkungen können die grundlegenden Techniken der FMV-Analyse mit einigen Änderungen zur Analyse von UAP-Fällen angewendet werden. AARO rekonstruierte die Flugbahn und Position der F/A-18 und bewertete mögliche Flugbahnen des „Go Fast“-UAP mithilfe der Mathematik, Standardmethoden und Konventionen, die in den UAS Datalink Local Set Standards (MISB ST 0601.19 vom 2. März 2023) des Motion Imagery Standards Board der National Geospatial-Intelligence Agency (NGA) definiert sind [Ref. 3]. In diesem Dokument werden schrittweise Berechnungen bereitgestellt, um die Bewegungseigenschaften des UAP im „Go Fast“-Ereignis anhand desselben öffentlich zugänglichen Videos abzuschätzen.
Daten
Die einzigen Daten, die AARO vom „Go Fast“-Ereignis zur Verfügung standen, stammten aus einer komprimierten Windows-Media-Datei (.wmv) [Ref. 4]. Die Metadaten der Aufzeichnung enthalten nicht die georeferenzierte Position und den Kurs der F/A-18, die zur Bestimmung der absoluten Position und der Flugeigenschaften des UAP erforderlich sind. Die Sensoranzeige enthält jedoch genügend Informationen, um die Geschwindigkeit, den relativen Kurs und die Höhe des UAP zu ermitteln. Diese erforderlichen Informationen sind der Höhenwinkel des Sensors, der Azimutwinkel des Sensors, die Entfernung von der F/A-18 zum Ziel, die Höhe der F/A-18, die Geschwindigkeit der F/A-18 und die relativen Frame-Zeiten. Die Sensor-Pod-Anzeige zeigt die meisten dieser Werte als Ganzzahlen an, was die Genauigkeit der anfänglichen Berechnungen einschränkt.
1 Die Anzeige ist in Abbildung 1 mit den beschrifteten Feldern dargestellt.
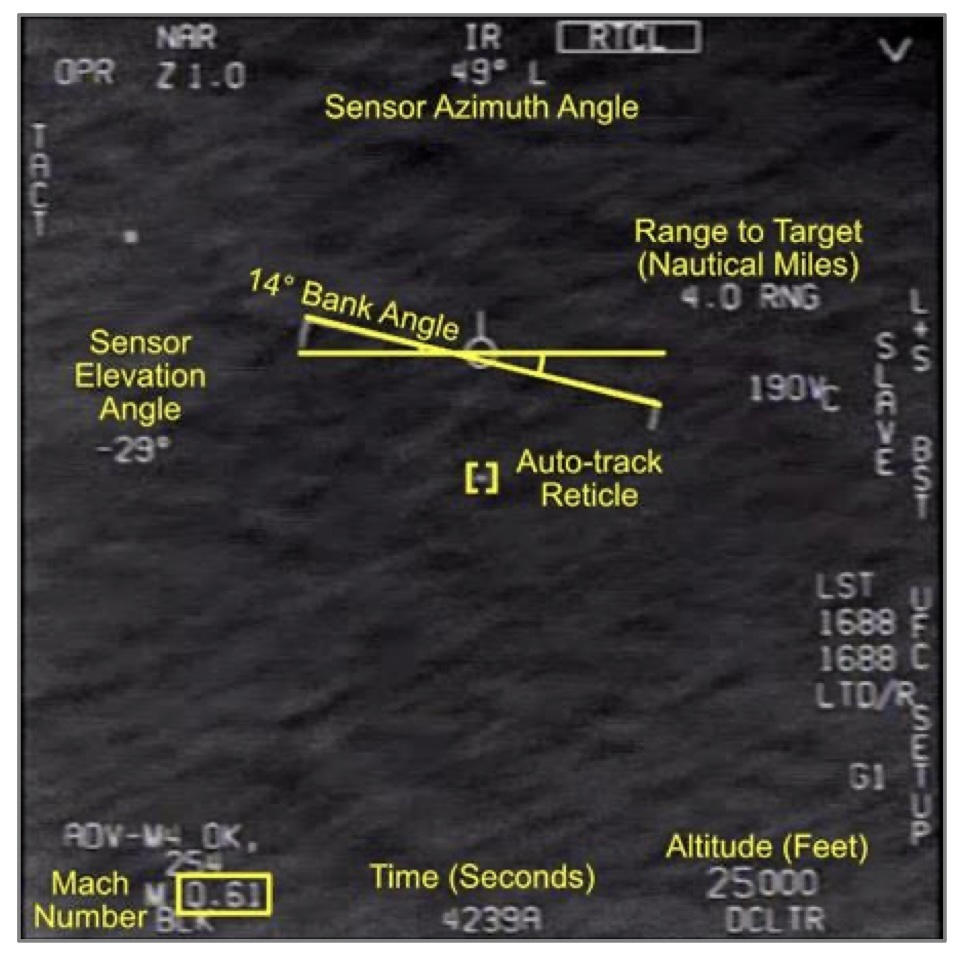
Abbildung 3: Einer der beiden in der Analyse verwendeten Frames mit kommentierten Feldern zeigt die aus dem Video extrahierten und in Berechnungen verwendeten Daten.
Um die Geschwindigkeit des UAP zu schätzen, bestand der erste Schritt darin, seinen Standort an zwei Positionen zu bestimmen, die durch einen bekannten Zeitraum getrennt waren. Dazu muss die Entfernung zum Ziel bekannt sein. Von 4232 Sekunden bis zum Ende des Videos erfasste der Tracker eine Zielverfolgung auf dem UAP, wodurch die Entfernung gemeldet werden konnte. Innerhalb dieses Abschnitts konzentrierte AARO seine Analyse auf einen 13-sekündigen Ausschnitt aus dem Filmmaterial zwischen 4239 Sekunden („t1“) und 4252 Sekunden („t2“). AARO wählte diesen Abschnitt aus, da zwischen t1 und t2 der Neigungswinkel, die Höhe und die Fluggeschwindigkeit des Flugzeugs nahezu konstant blieben. Dies vereinfachte die Schätzung der Flugeigenschaften der F/A-18 aufgrund der geringeren Anzahl von Variablen. Bei t1 betrug die Entfernung der F/A-18 zum UAP 4,0 NM und verringerte sich bei t2 auf 3,4 NM.
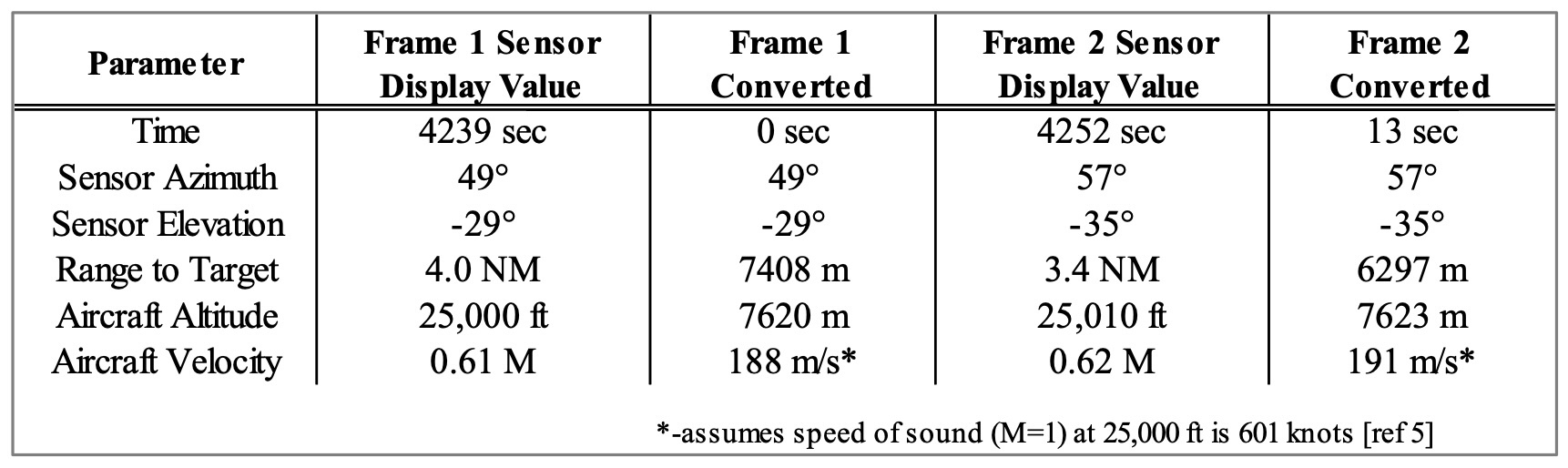
Tabelle I enthält die aus dem Videomaterial bei t1 und t2 extrahierten Daten. Reichweite und Höhe wurden in metrische Einheiten umgerechnet, um die Konsistenz der Berechnungen zu wahren. Der Querneigungswinkel der F/A-18 wurde
mithilfe der gelben Linien gemessen, die über die Horizontalflug- und Rollanzeigelinien im Display gezogen wurden,
wie in Abbildung 1 dargestellt. Dieser Winkel, bezeichnet mit θB, betrug von t1 bis t2 ungefähr 14°. Für diesen Zeitraum wurde eine durchschnittliche Flughöhe des Flugzeugs von 7.621 m angenommen. Die Geschwindigkeit in Mach-Zahl wurde in m/s [Ref. 5] auf der Flughöhe der F/A-18 umgerechnet, was zu einer Durchschnittsgeschwindigkeit von etwa 190 m/s über den Zeitraum führte.
Tabelle I: Daten, extrahiert aus den Bildern bei 4239 Sekunden und 4252 Sekunden im „Go Fast“-Video.
UAP-Standortberechnungsmethode
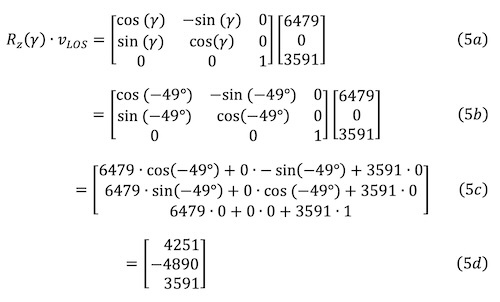
Dieser Abschnitt enthält schrittweise Berechnungen zum Ermitteln der UAP-Standorte relativ zur F/A-18 an zwei Punkten im „Go Fast“-UAP-Ereignis. Dies vermittelt dem Leser ein grundlegendes Verständnis der Methodik und eine grobe Schätzung der Geschwindigkeit und des Kurses der UAP. Die Methodik wird dann in einem späteren Abschnitt auf alle Frames im Intervall t1 bis t2 angewendet. Da die Daten keine absolute Position der F/A-18 bei t1 liefern, wurde das Flugzeug willkürlich an einem Referenzpunkt platziert, der das Problem vereinfachte: dem Ursprung eines kartesischen x-y-z-Koordinatensystems. Die Achsen dieses Systems wurden in Übereinstimmung mit MISB ST 0601.19 [Ref. 3, S. 12] definiert und hier in Abbildung 2 bereitgestellt. Die Längsachse des Flugzeugs ist die +x-Achse, die Querachse die +y-Achse und die vertikale Achse die +z-Achse.
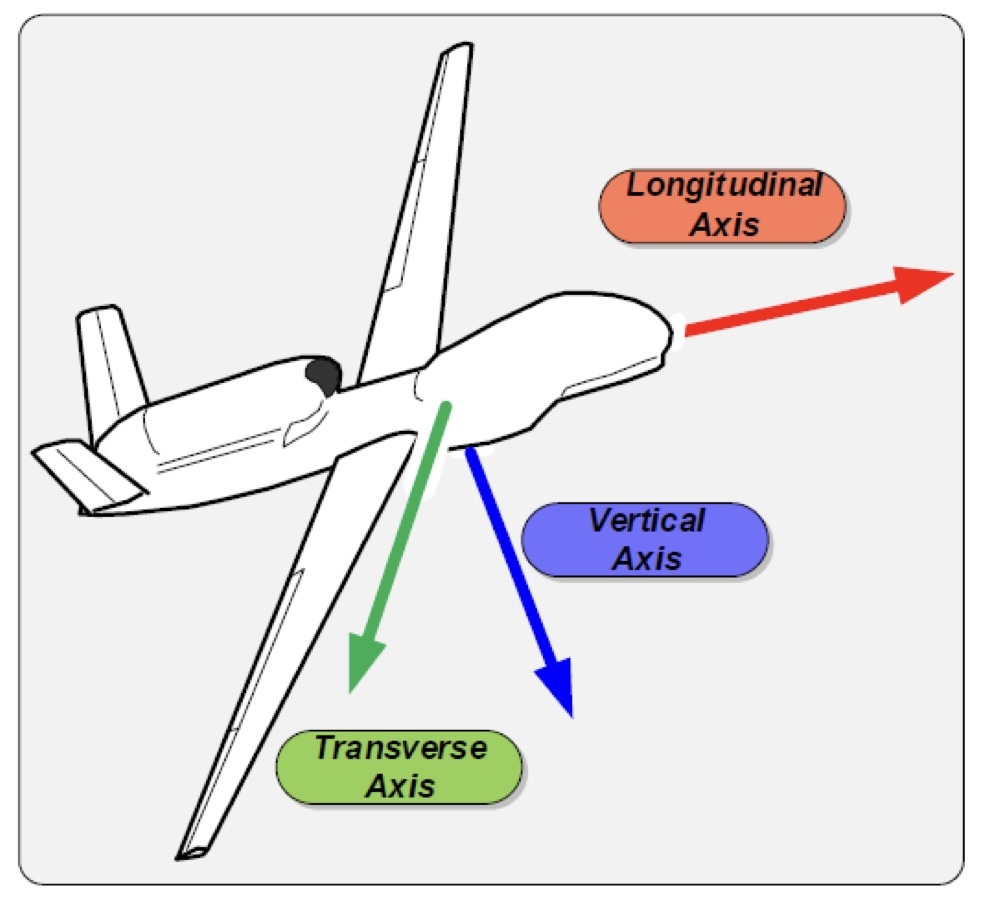
Abbildung 4: Die drei Achsen, die in der FMV-Analyse relativ zu einer Luftplattform definiert sind. Längs ist das +x, quer ist das +y und vertikal ist das +z (nach unten zeigend).
Dieses Koordinatensystem wurde auf die F/A-18 angewendet, wie in Abbildung 3 dargestellt. Da die Flughöhe des Flugzeugs während der gesamten Flugdauer konstant blieb, ist sein Flugweg eben und auf die x-y-Ebene beschränkt (z = 0).
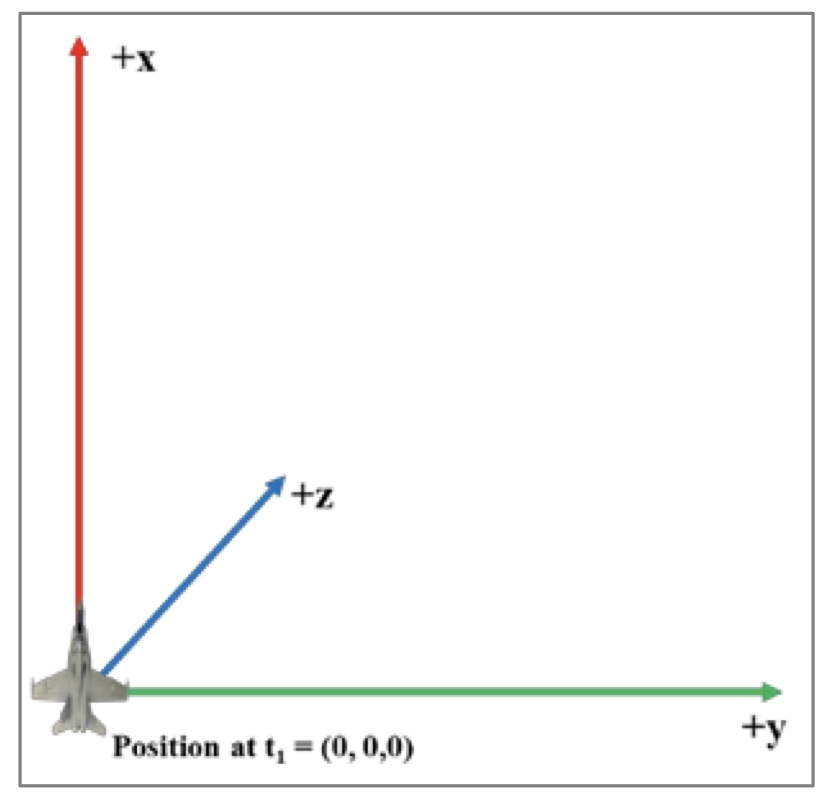
Abbildung 5: Das Koordinatensystem der Draufsicht ist mit der Position der F/A-18 am Ursprung mit den Koordinaten [0,0,0] definiert. Das Flugzeug bewegt sich in die +x-Richtung.
Mit der bei t1 definierten Position der F/A-18 wurde der Standort des UAP relativ zu dieser Position berechnet. Diese Berechnung wurde durchgeführt, indem eine Sichtlinie (LOS) oder ein „Zeige“-Vektor definiert und dieser Vektor dann um die Achsen mit den in Tabelle I angegebenen Sensorazimut- und -höhenwinkeln gedreht wurde, um auf den Standort des UAP zu zeigen.
Der Drehwinkel um die x-Achse ist die Rollbewegung des Flugzeugs und wird mit α bezeichnet; der Drehwinkel
um die y-Achse ist die „Auf- und Ab“-Bewegung aufgrund der Neigung des Flugzeugs oder der Sensor-Zeigehöhe und wird mit β bezeichnet; der Drehwinkel um die z-Achse ist die „Links- und Rechts“-Bewegung aufgrund der Gierung des Flugzeugs oder der Sensor-Zeigeazimut und wird mit γ bezeichnet. Für diesen FLIR-Sensor ist der Querneigungs-
(oder Roll-)Winkel des Flugzeugs in der Höhe und den Winkeln des Sensors enthalten und wird nicht gesondert behandelt. Der Leser wird gebeten, [Ref. 3] für weitere Erläuterungen zu diesen Winkeln zu konsultieren.
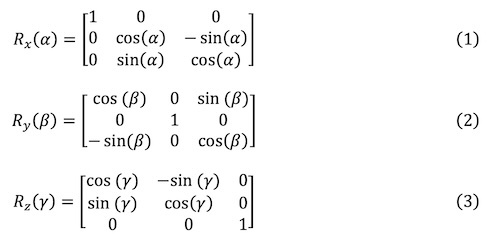
Diese Rotationen wurden durch Anwenden von 2-D-Rotationsmatrizen durchgeführt, die aus der zugrunde liegenden
Trigonometrie [Ref. 6] abgeleitet wurden. Die Gleichungen (1), (2) und (3) liefern diese 3x3-Rotationsmatrizen um die x-, y- und z-Achsen mit den definierten Winkeln α, β bzw. γ.
Diese Drehungen sind relativ zur Fluglage des Flugzeugs. Daher wurde die anfängliche Sichtlinie als Einheitsvektor definiert, der von der F/A-18 geradeaus entlang der +x-Achse zeigt. Dieser Vektor wird in kartesischer (x, y, z) Vektornotation als v = <1,0,0> dargestellt. Die Größe des Vektors wird durch die Entfernung zum UAP definiert. Durch richtiges Drehen oder Ausrichten dieses Vektors um die angegebenen Sensorwinkel ergibt sich die relative Position des UAP zum Flugzeug.
Position des UAP bei t1
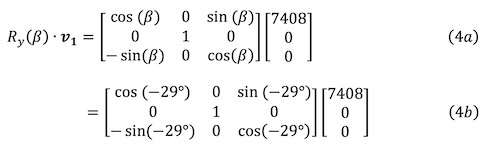
Die Länge oder Größe des LOS-Vektors bei t1 wurde durch Multiplikation des Einheitsvektors v mit der Entfernung zum Ziel definiert. Bei t1 betrug die Entfernung 7.408 m, daher war der anfängliche LOS-Vektor v1 = <7.408, 0, 0> m.
Der nächste Schritt bestand darin, diesen Vektor auf den UAP zu richten. Zuerst wurde er um den Sensorhöhenwinkel (Neigungswinkel) β um die y-Achse gedreht:
+++
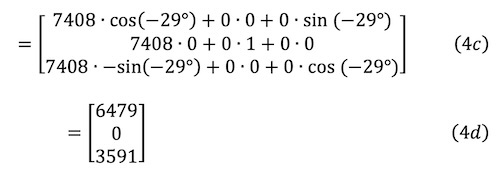
Als nächstes wurde das Vektorergebnis aus (4d) durch den Sensorazimut γ um die z-Achse gedreht. Beachten Sie, dass
der Sensor 49° nach links zeigt (gekennzeichnet durch das „L“), was im definierten Koordinatensystem ein negativer Winkel ist. Diese Berechnungen sind in (5a-d) angegeben:
Der resultierende Vektor <4.251, -4.890, 3.591> m bedeutet, dass sich der UAP 4.251 m vor, 4.890 m links (die y-Koordinate ist negativ) und 3.591 m unter (die +z-Achse zeigt nach unten) der F/A-18 befand. Bei 3.591 m unter der F/A-18 befand sich der UAP auf einer Höhe von 4.029 m (13.219 Fuß).
Standort des UAP bei t2
Um die Position des UAP bei t2 zu ermitteln, musste die Position der F/A-18 anhand der bekannten
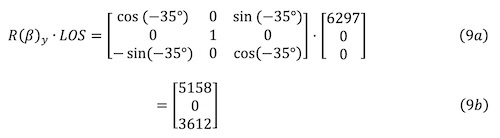
Flugdynamik geschätzt werden. Da das Flugzeug zwischen t1 und t2 eine Neigung von 14° aufwies, drehte es sich auf einer gekrümmten Bahn, während es sich mit einer Durchschnittsgeschwindigkeit von 190 m/s bewegte. Während der Drehung änderte es auch seinen Kurs weg von der +x-Achse. Diese Drehung weg von der Achse kann als Gierwinkel von φ relativ zu seiner Ausrichtung bei t1 dargestellt werden, wie in Abbildung 4 dargestellt.
Die gekrümmte Bahn der F/A-18 ist im Wesentlichen Teil eines Kreises. Der Radius dieses Kreises oder Krümmungsradius wurde aus (6) ermittelt.

Setzt man vFA18 = 190 m/s, die Erdbeschleunigung g = 9,81 m/s2 und θB = 14° in (6) ein, ergibt sich ein Krümmungsradius Rc von 14.759 m. Diese Werte sind in Abbildung 4 mit dem Krümmungsradius und der Position der F/A-18 zum Zeitpunkt t2 dargestellt.
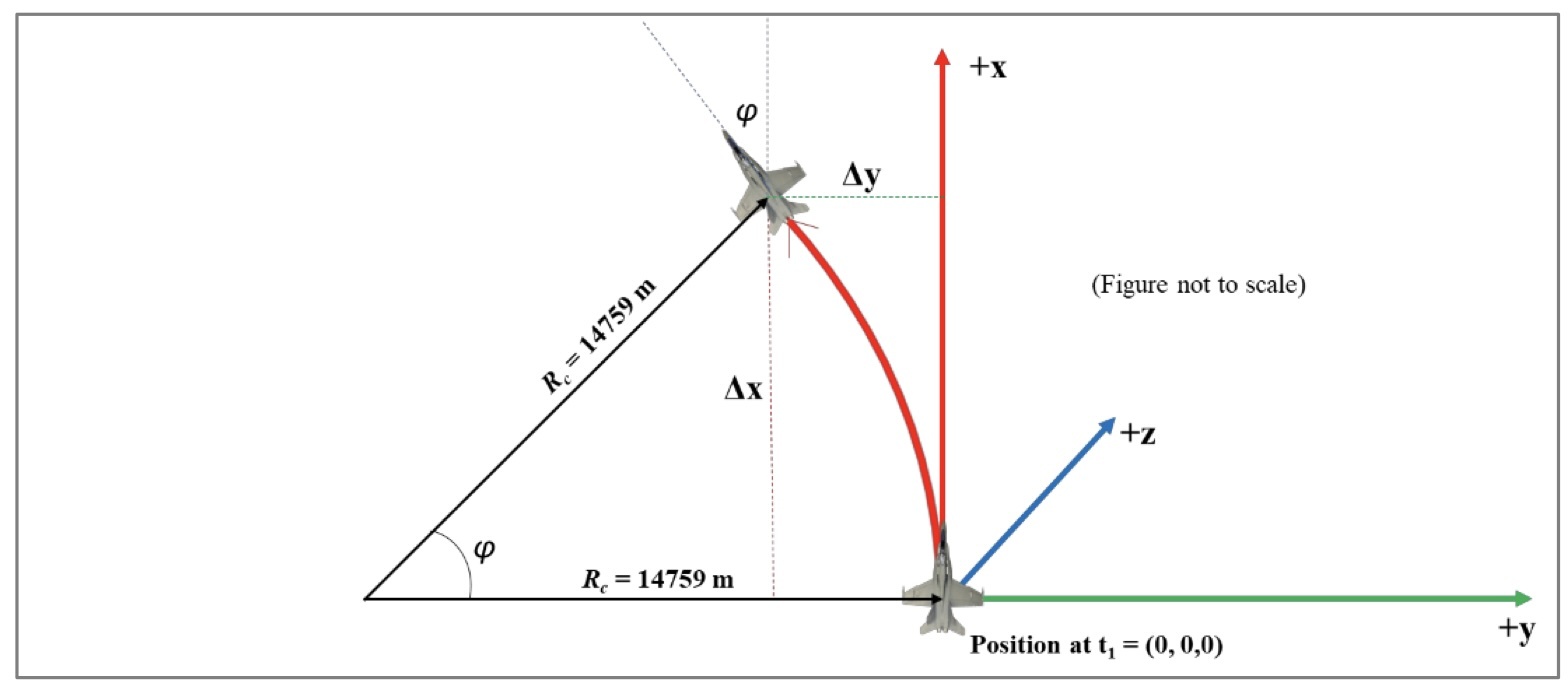
Abbildung 6: Die F/A-18 flog auf einem gekrümmten Pfad von ihrer Position bei t1 zu ihrer Position bei t2.
Um den Gierwinkel φ bei t2 zu ermitteln, beachten Sie, dass die beiden φ in Abbildung 4 gleich sind. Die Gesamtstrecke, die die F/A-18 bei einer Geschwindigkeit von 190 m/s über 13 Sekunden im Teilkreis zurücklegte, beträgt 2.470 m. Hätte das Flugzeug weitergeflogen, um einen Kreis zu vollenden, hätte es 2·π·Rc oder 92.736 m zurückgelegt.
Daher wurden nur 2,66 % eines 360°-Kreises vollendet, also φ = 9,6°. Da die Gierrichtung gegen den Uhrzeigersinn, weg von der positiven y-Achse, erfolgt, ist dies ein negativer Wert, oder φ = -9,6°.
Um die Position der F/A-18 bei t2 zu ermitteln, müssen die Δx- und Δy-Positionsänderungen vom Standort bei t1
ermittelt werden. Die Gleichungen (7) und (8) verwenden hierfür eine Zylinderkoordinatentransformation [Ref. 8].

Somit betrug die Verschiebung des Flugzeugs bei t2 [2.461, -207, 0] m oder 2.461 Meter vor und 207
Meter links2 von seiner Position bei t1. Dies wird kurzzeitig verwendet, um die Position des UAP bei t2 zu ermitteln.
Bei t2 befand sich das UAP in einer Entfernung von 6.279 m von der F/A-18, sodass der Richtungsvektor v2 durch <6.279, 0,0> m gegeben ist. Wie bei t1 wurde der LOS-Vektor als in Richtung der +x-Achse zeigend definiert, nicht in Richtung des Kurses des Flugzeugs.3 Bei t2 betrugen die Höhen- und Azimutwinkel des Sensors β = -35° bzw. γ = -57°. Das zusätzliche Gieren der F/A-18 von -9,6° erforderte eine zusätzliche Rotation.4 Die Rotation um -35° um die y-Achse zur Sensorhöhe ist in (7a-7b) angegeben.5
--------------------------------------------------------
2 Das Negativ wird hier angewendet, um unserem Koordinatensystem zu entsprechen.
3 Dies ist nicht die Richtung, in die die F/A-18 zeigte, da es sonst eine y-Komponente des Vektors gäbe. Der zusätzliche Gierwinkel
wird in den Rotationsmatrizen behandelt.
4 Der Sensorazimut und das Gieren der F/A-18 könnten hinzugefügt und in einer einzigen Rotation ausgeführt werden. Im Allgemeinen hätte das Flugzeug Roll- und Nickwinkel und das Hinzufügen des Plattformwinkels zum Sensorwinkel könnte ein falsches Ergebnis ergeben.
5 Der ausgeschriebene Schritt, der die Multiplikation der Matrizen darstellt, wird hier übersprungen.
--------------------------------------------------------
Die Drehung um die z-Achse um -57° zur Berücksichtigung des Sensorazimuts ist angegeben (8a-8b).
Und schließlich zeigen (9a-9b) die Drehung um die z-Achse von -9,6° für die Gierung des Flugzeugs relativ zur
Position 1.
Dies bedeutet, dass sich der UAP bei t2 2.049 m vor, 4.734 m links und 3.612 m unter der Position der F/A-18 befand. Wir können nun die Koordinaten der F/A-18 aus (7) und (8) anwenden, um die Position des UAP bei t2 zu ermitteln. Addiert man die relativen Koordinaten des UAP aus (9b) zur Δx- und Δy-Verschiebung des Flugzeugs von t1 bis t2, erhält man die Position des UAP.
![]()
Der UAP befand sich 3.612 m unter der F/A-18 oder auf einer Höhe von 4.008 m (13.150 Fuß), sehr nahe an der Höhe bei t1, was darauf hindeutet, dass sich der UAP auf einer weitgehend ebenen Bahn bewegte.
Ergebnisse
Da der Standort des UAP zu t1 und t2 bekannt war, wurde die Entfernung zwischen den Standorten mithilfe der Distanzformel in kartesischen Koordinaten berechnet, wie in (13a-13c) dargestellt.
![]()

Dividiert man diese Distanz durch die 13 Sekunden, die zwischen t1 und t2 vergangen sind, erhält man eine geschätzte Geschwindigkeit von etwa 20 m/s oder 45 mph. Die Richtung des UAP, φUAP, wurde ebenfalls aus den Δx- und Δy-Komponenten der Standorte berechnet.

Der Kurs des UAP ist vorwärts entlang der +x-Achse und leicht in die negative y-Richtung und bewegt sich in
der gleichen allgemeinen Richtung wie die F/A-18 (-9,6°), aber etwa 9-mal langsamer. Zur Erinnerung: Alle
dargestellten Standorte und Richtungen beziehen sich auf das definierte Koordinatensystem. Die Angabe von
Richtungen wie Nord, Süd, Ost und West ist ohne Kenntnis des Standorts oder des Kurses der F/A-18 nicht möglich.
Schätzung des UAP-Reisewegs
In den vorherigen Abschnitten wurde die Methodik erläutert, die zur Berechnung der Positionen des UAP an den beiden Endpunkten des Zeitintervalls, t1 und t2, verwendet wurde. Die resultierende Geschwindigkeit und der relative Kurs gingen davon aus, dass das UAP zwischen diesen beiden Punkten auf einem weitgehend geraden, direkten Weg unterwegs war. Derselbe mathematische Ansatz wurde dann auf jedes Bild des dreizehn Sekunden langen Videos angewendet, um den kontinuierlichen Weg des UAP vom ersten bis zum letzten Punkt zu schätzen. Diese Berechnung erforderte eine Schätzung der Zeit, des Azimuts und der Höhe des Sensors, der Entfernung zum Ziel und der Position der F/A-18 für alle Bilder in diesem Zeitraum. Die Metadaten lieferten relative Bildzeiten, wobei zwischen den Bildern im 30-Hz-Video 0,033 Sekunden vergingen.
Flugbahn der F/A-18
Die Flughöhe, der Neigungswinkel und die Fluggeschwindigkeit der F/A-18 blieben zwischen t1 und t2 konstant. Daher blieb der Krümmungsradius ihrer Flugbahn ab (6) konstant. Die zu jedem Zeitpunkt zurückgelegte Distanz war die verstrichene Frame-Zeit multipliziert mit der Geschwindigkeit. Position und Gierwinkel wurden dann mit den zuvor beschriebenen Methoden berechnet.
Pfad des UAP
Der Sensorazimut, die Sensorhöhe und die Entfernung zum Objekt änderten sich während des Videos.
Die Anzeige des Sensors zeigte diese Änderungen in Ganzzahlen an, sodass viele Frames vergingen, bevor ein
Wert erhöht oder verringert wurde. Genauere Schätzungen wurden vorgenommen, indem die
Frames und Zeiten notiert wurden, in denen eine Menge erhöht oder verringert wurde. Beispielsweise muss in dem Frame, in dem sich ein Wert von 50 auf 51 ändert, der Wert in diesem Frame 51,0 (oder 50,56) sein. Diese
„Änderungsframes“ wurden für den Sensorazimut, die Sensorhöhe und die Entfernung zum Ziel im
Zeitintervall von t1 bis t2 identifiziert und werden durch die schwarzen Punkte in den Diagrammen in den Abbildungen 5-8 dargestellt.
Die Werte für alle Frames zwischen 4239 Sekunden und 4252 Sekunden wurden geschätzt, indem eine Polynomkurve 2.
Ordnung an die Datenpunkte angepasst wurde. Diese Kurven sind die gepunkteten Linien in den Abbildungen 5-8 und passen im Allgemeinen sehr gut durch die schwarzen Punkte. Die Anpassungsgleichung und die Schätzung des Anpassungsfehlers R2 werden ebenfalls bereitgestellt. Ein R2 gleich 1 würde perfekt zu den Daten passen.
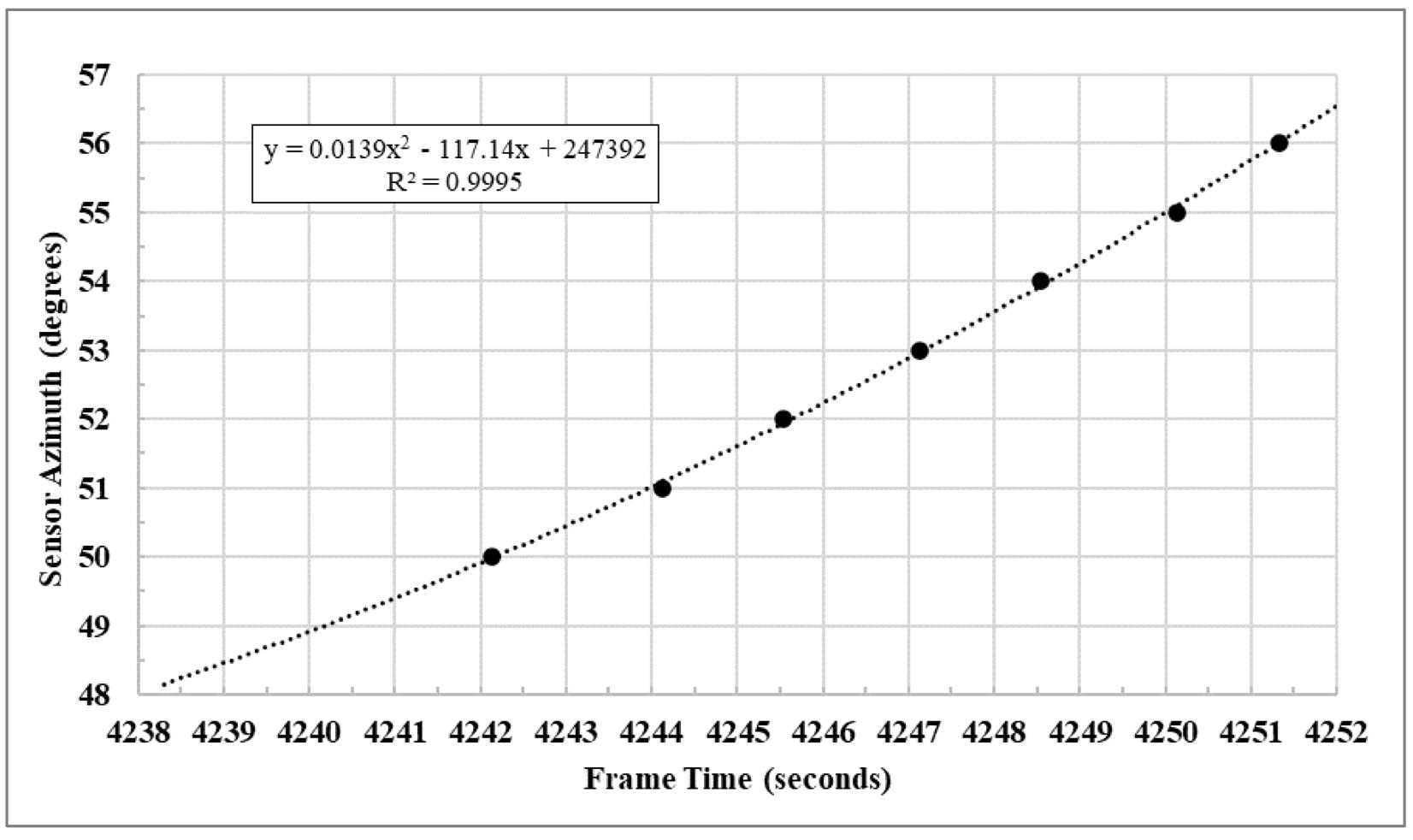
Abbildung 7: Die Sensorazimut-Datenpunkte „Frame ändern“ werden im Vergleich zur Frame-Zeit dargestellt. Die gepunktete Linie wurde an die Punkte angepasst, um den Azimut für alle Frames im Zeitintervall zu schätzen.
-------------------------
6 Ob der Wert 50,5 oder 51,0 ist, macht keinen Unterschied, da die Zeiten und Positionen alle relativ sind und die Geschwindigkeit durch Subtraktion ermittelt wird. Für jedes Bild verbleibt ein Unsicherheitsfehler von 0,033 Sekunden, der hier jedoch vernachlässigbar ist.
-------------------------
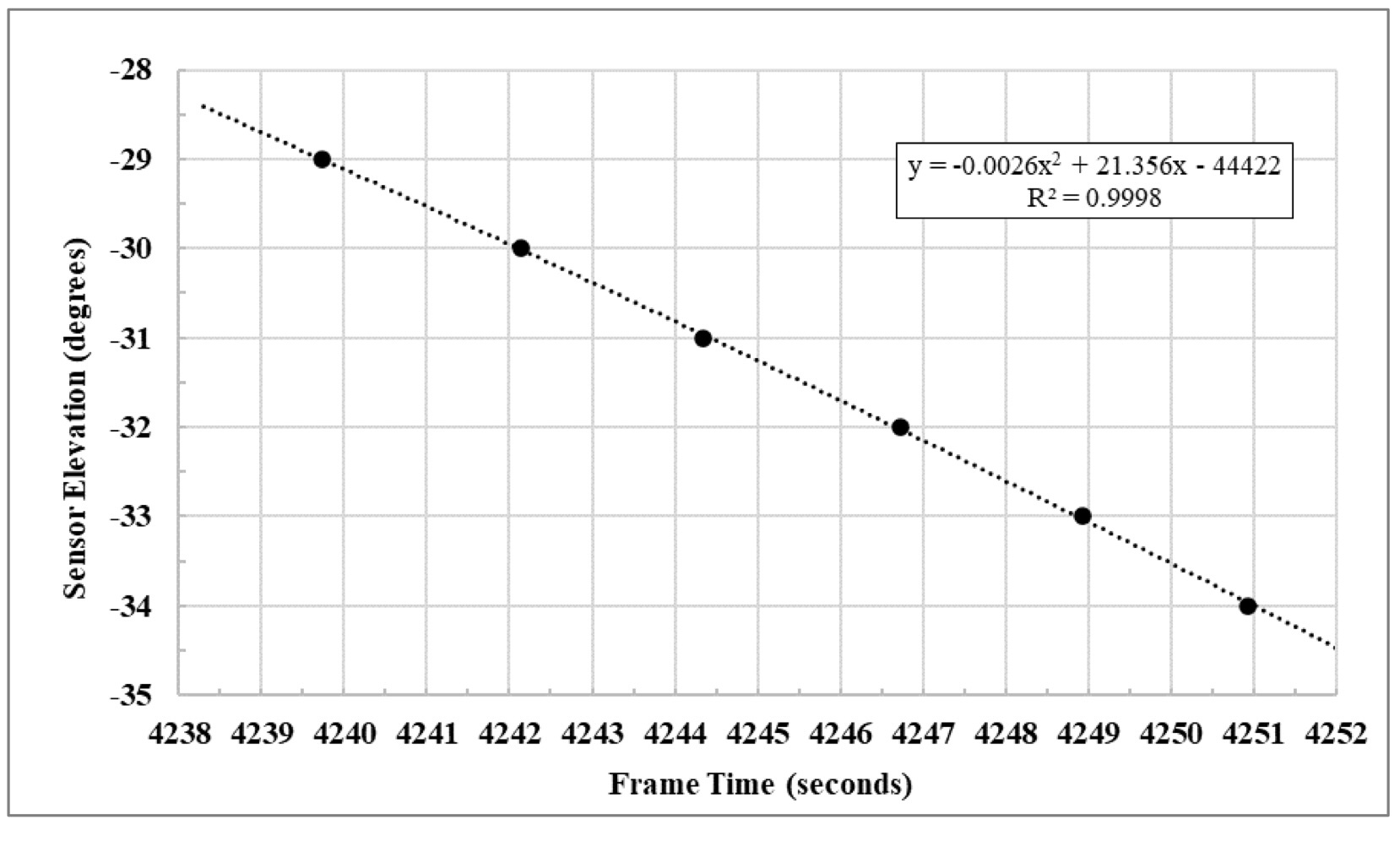
Abbildung 8: Die Datenpunkte der Sensorhöhe „Frame ändern“ werden im Vergleich zur Frame-Zeit dargestellt. Die gepunktete Linie wurde an die Punkte angepasst, um die Höhe für alle Frames im Zeitintervall zu schätzen.
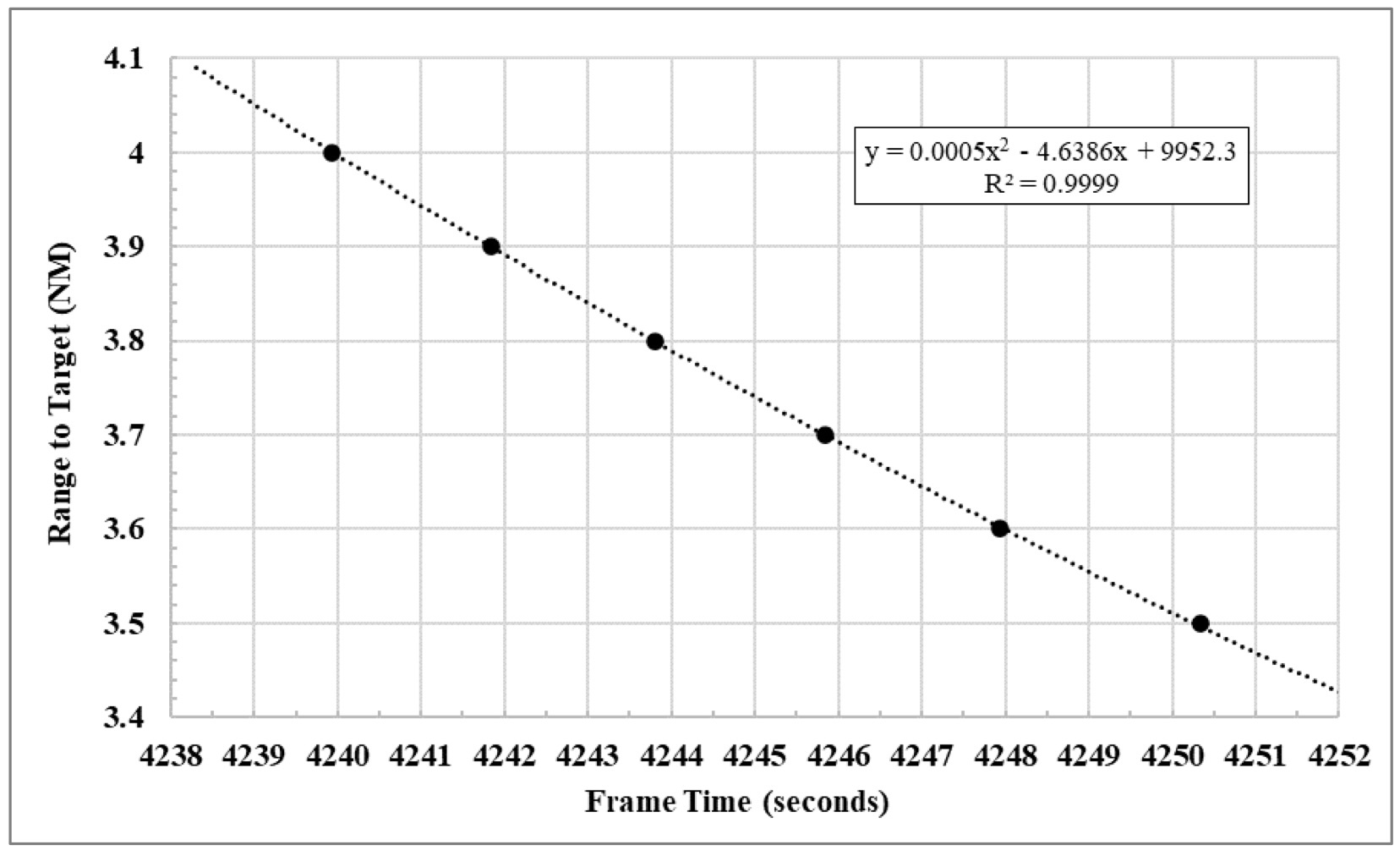
Abbildung 9: Die Reichweite zu den Zieldatenpunkten „Frame ändern“ wird im Vergleich zur Frame-Zeit dargestellt. Die gepunktete Linie wurde an die Punkte angepasst, um die Reichweite für alle Frames im Zeitintervall abzuschätzen.
Mit den für alle Frames und Zeiten geschätzten Werten wurde die im vorherigen Abschnitt beschriebene Methode der Vektorrotation und Punktverschiebung angewendet, um die dreidimensionale Flugroute des UAP zu ermitteln. Die resultierende Route durch die x-y-Ebene ist in Abbildung 8 dargestellt. Die Flugrichtung des UAP ist ein relativ gerader Weg von oben links nach unten rechts. Das Höhenprofil ist in Abbildung 9 dargestellt und zeigt, wie das UAP etwa 10 m (30 Fuß) ansteigt und gegen Ende einen langsamen, kurvenreichen Abstieg macht. Die Biegungen am Ende beider Kurven können auf eine leichte Richtungsänderung hinweisen, sind aber wahrscheinlicher auf einen Restfehler bei der Schätzung der Flugroute der F/A-18 zurückzuführen.
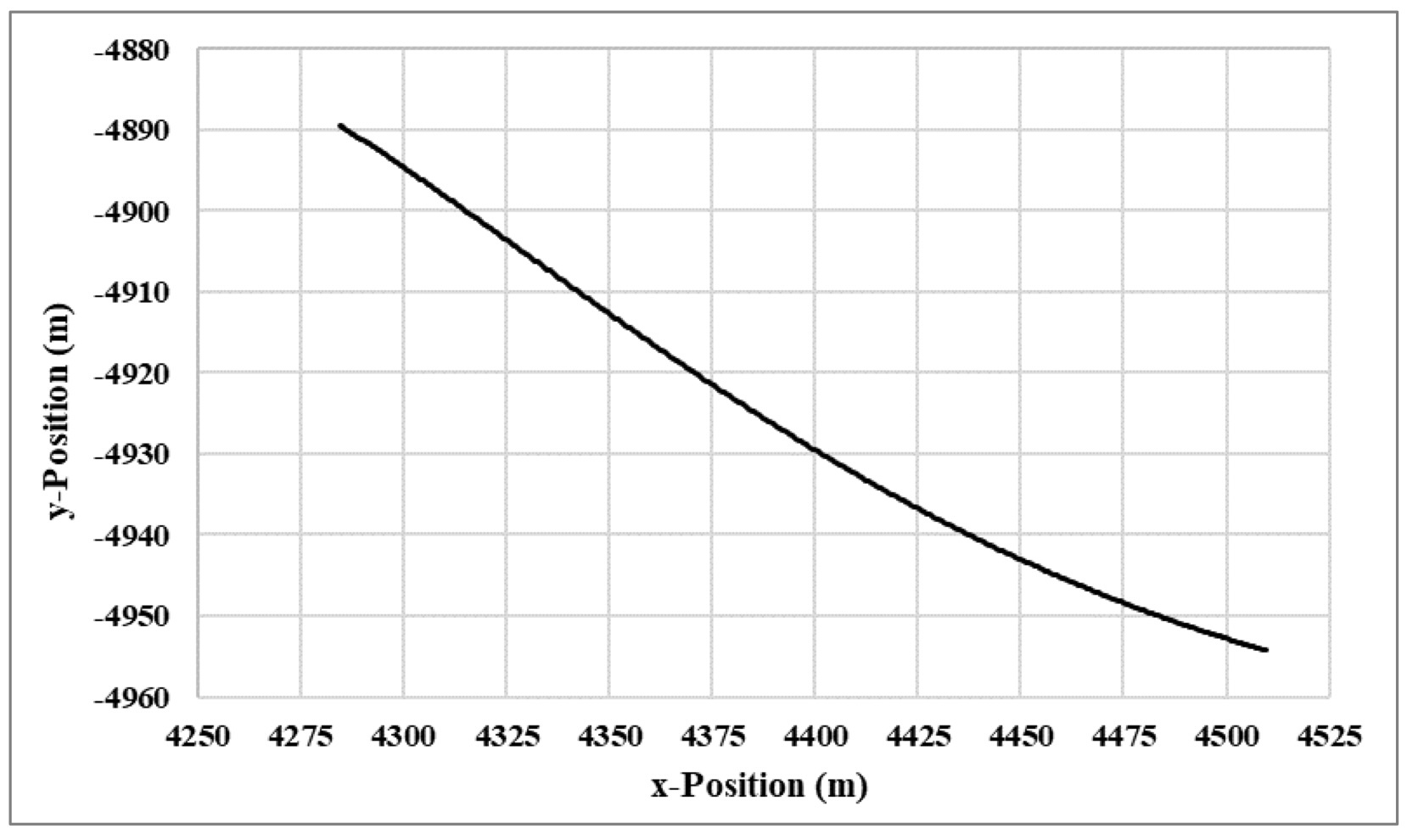
Abbildung 10: Dargestellt ist die Position des UAP in der x-y-Ebene über den betrachteten Zeitraum. Die Flugrichtung ist
von links oben nach rechts unten.
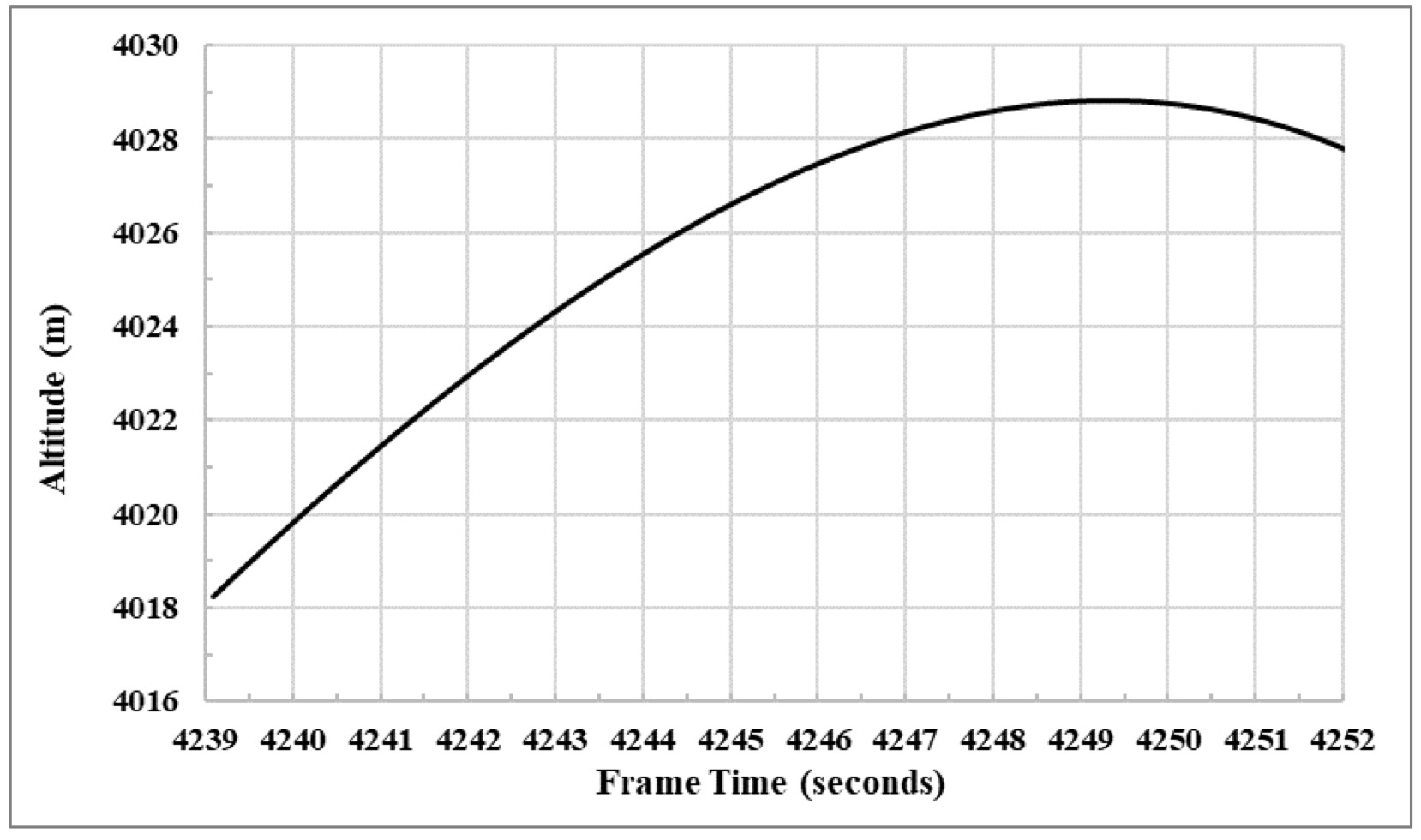
Abbildung 11: Die Höhe des UAP als Funktion der Zeit zeigt einen langsamen Anstieg über den größten Teil des Weges mit einem leichten Abstieg in den letzten Sekunden.
Die Anfangs- und Endpunkte des in den Abbildungen 8 und 9 definierten Pfads wurden mit den Ergebnissen der Endpunktanalyse im vorherigen Abschnitt verglichen, um zu überprüfen, ob die Pfadberechnungen konsistent sind und die Methodik korrekt angewendet wurde. Die Ergebnisse sind in Tabelle II aufgeführt und zeigen eine gute Übereinstimmung. Da die Frame-by-Frame-Methode die Parameter mit einer besseren Genauigkeit schätzt als nur ganze Zahlen und jedem Wert die Zeit genauer zuweist, wird davon ausgegangen, dass diese Methode genauer ist. 7
Tabelle II: Vergleich der Ergebnisse der Zweipunkt- und der kontinuierlichen Pfadanalyse.

Berücksichtigung vorherrschender Winde
Bis jetzt ging die Analyse davon aus, dass die Geschwindigkeit und Richtung der Höhenwinde keinen Einfluss auf die Flugroute der F/A-18 haben. Die Geschwindigkeit auf der Sensoranzeige in Mach-Zahl stellt die relative Luftgeschwindigkeit des Flugzeugs dar und berücksichtigt nicht die Umgebungswindgeschwindigkeit. Mit einer Methode zur Berechnung der UAP-Standorte wurden die möglichen Auswirkungen der Höhenwinde untersucht. Dies geschieht, indem die Geschwindigkeit und Richtung des Windes zur Geschwindigkeit und Richtung der F/A-18 addiert werden, um eine neue Flugroute zu erhalten. Anschließend wird die UAP-Flugroute wie in den vorherigen Abschnitten beschrieben bestimmt.
Windgeschwindigkeit und -richtung
Im UAP-Bericht oder -Video wurden keine Informationen zu den atmosphärischen Bedingungen bereitgestellt, nur eine
Zeit und ein allgemeiner Standort. Daher wurden die historischen Daten für Windgeschwindigkeit, -richtung und -höhe
aus einer historischen Datenbank bezogen (Ref. 9). Die Daten für das entsprechende Datum und den entsprechenden Ort wurden gefunden und lagen innerhalb von 15-20 Minuten um die Zeit, die mit dem „Go Fast“-Ereignis gemeldet wurde. Die Windgeschwindigkeit und -richtung sind in Abbildung 10 dargestellt. In 25.000 Fuß (7.620 m) Höhe betrug die Windgeschwindigkeit ungefähr 101 Knoten (52,0 m/s) bei einem Kurs von 255°, hauptsächlich aus West-Südwest und in Richtung Ost-Nordost wehend. In 13.000 Fuß (3.692 m) Höhe betrug die Windgeschwindigkeit 60 Knoten (30,9
m/s) bei einem Kurs von 265°, hauptsächlich aus Westen.
------------------
7 Alle Analyseergebnisse beziehen sich auf die Genauigkeit der geschätzten Flugroute der F/A-18. Es ist nicht möglich, die Genauigkeit mit Sicherheit anzugeben, ohne die genaue Route des UAP zu kennen.
8 In Zukunft werden wir das metrische System verwenden. Die Werte sind hier in Knoten und Fuß angegeben, um die Daten so darzustellen, wie sie aus der Quelle stammen.
------------------
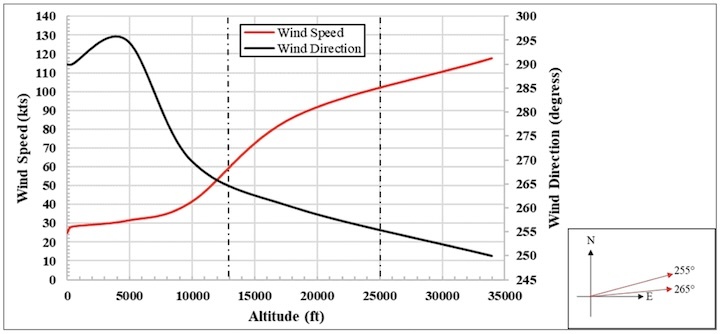
Abbildung 12: Windgeschwindigkeit (linke Achse) und -richtung (rechte Achse) am ungefähren Ort des „Go Fast“-Ereignisses.
Da der genaue Standort und Kurs der F/A-18 nicht bekannt sind, konnte die Flugroute nicht in Kompassrichtungen ausgedrückt werden. Daher wurde die Auswirkung der Windgeschwindigkeit für alle möglichen Richtungen bewertet. Zur Veranschaulichung der Methodik werden jedoch zunächst vier Fälle beschrieben: Rückenwind, Gegenwind, Seitenwind von links und Seitenwind von rechts relativ zur F/A-18. Diese Richtungen wurden am anfänglichen Standort t1 im selben Koordinatensystem definiert, das in den Abbildungen 3 und 4 beschrieben ist. In diesem Koordinatensystem wurde Rückenwind als Kurs von 0° (in Richtung der +x-Achse), Seitenwind von links bei 90° (in Richtung der +y-Achse), Gegenwind bei 180° (in Richtung der -x-Achse) und Seitenwind von rechts bei 270° (in Richtung der -y-Achse) definiert.
Angepasste Flugrouten der F/A-18
Die Windgeschwindigkeit (Geschwindigkeit und Kurs) addiert sich an jedem
Punkt zur Geschwindigkeit und zum Kurs des Flugzeugs. Vorausgesetzt, der Wind ist über das 13-Sekunden-Intervall konstant, wird der Wind die F/A-18 im Wesentlichen
von ihrer berechneten Flugroute ohne Wind in die Windrichtung „schieben“.
Abbildung 11 zeigt angepasste Flugrouten unter Berücksichtigung der Windrichtung mit der Flugroute ohne Wind
als schwarze Linie zur Referenz.
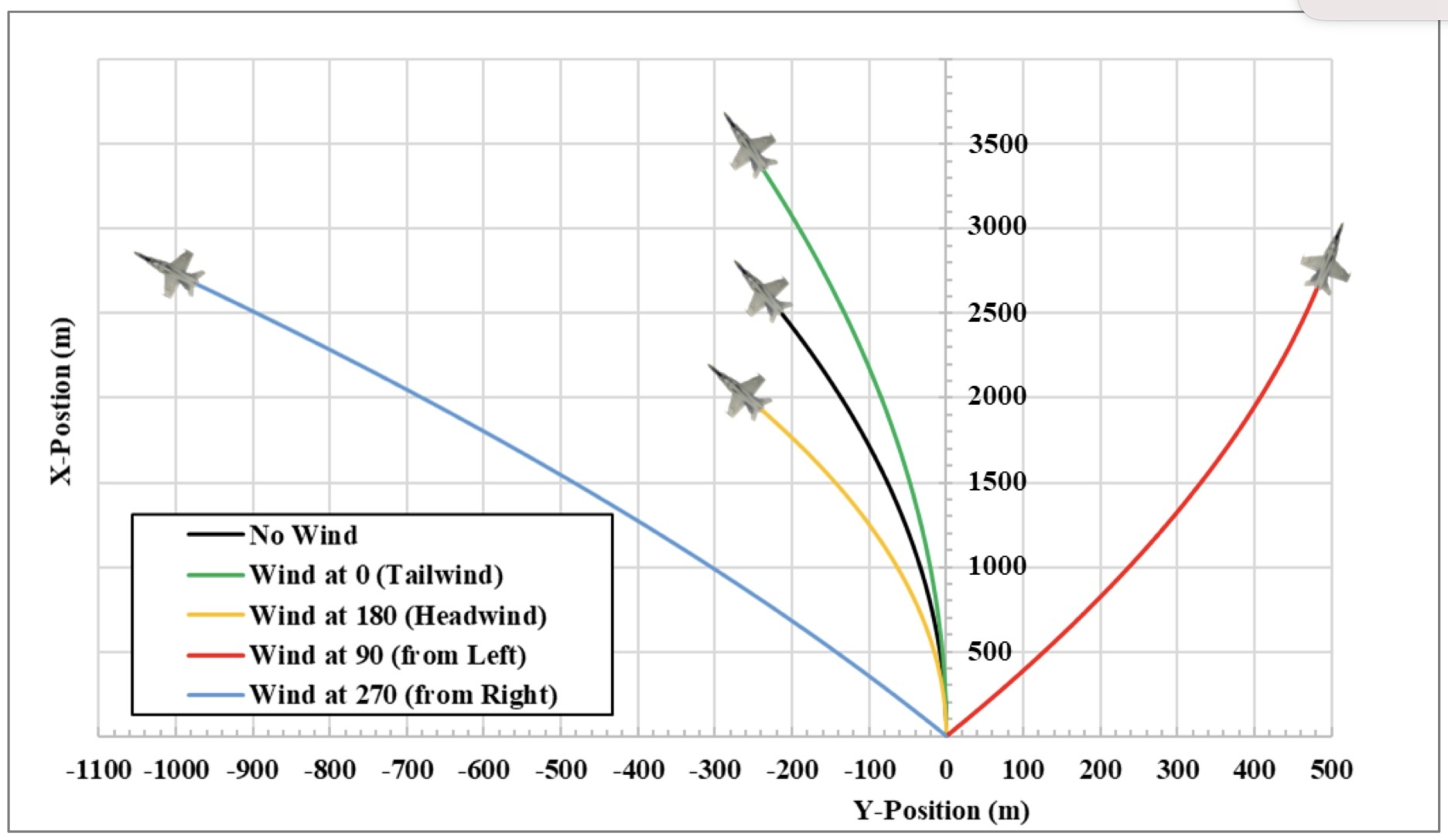
Abbildung 13: Die Flugbahn der F/A-18 ohne Wind ist schwarz. Die anderen Linien zeigen die Flugbahnen mit Gegen-, Heck- und zwei Seitenwinden.
Geschätzte Flugbahn des UAP
Mit der berechneten Flugbahn der F/A-18 für die vier Windbedingungen wurden die resultierenden Bahnen des UAP mit derselben Methode ermittelt wie im Fall ohne Wind. Die vier resultierenden Bahnen sind in Abbildung 12 dargestellt. Beachten Sie, dass das UAP in jedem Fall in dieselbe allgemeine Richtung wie der Wind in der Höhe der F/A-18 (7.620 m) fliegt, was mit der Windrichtung in der Höhe des UAP vergleichbar ist (ein Unterschied von 10°, wie in Abbildung 10 dargestellt).
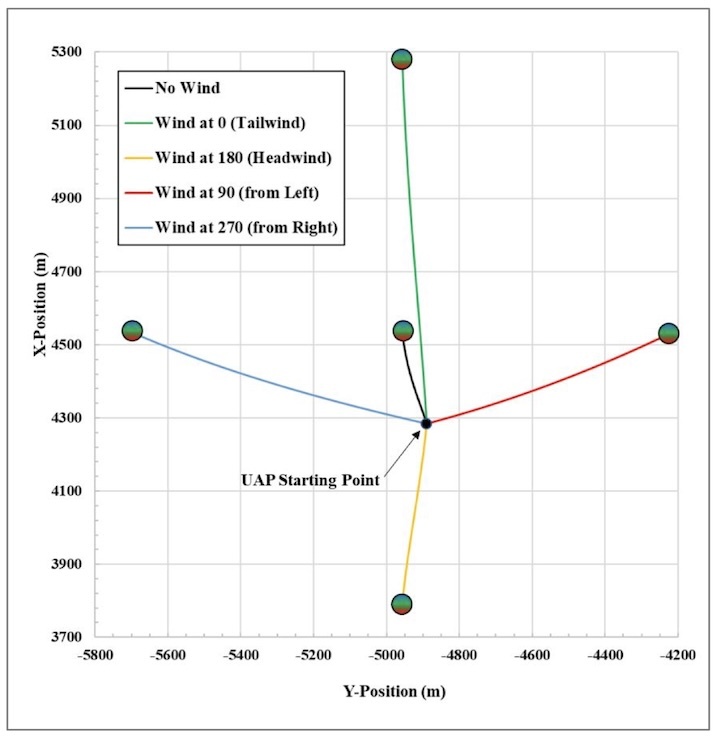
Abbildung 14: Start- und mögliche Endpunkte des UAP unter Berücksichtigung der Auswirkung der Windgeschwindigkeit auf die Flugroute der F/A-18. Die schwarze Linie stellt den Fall „kein Wind“ dar.
Um diese Analyse zu erweitern und zu bestimmen, ob es irgendwelche abweichenden Bedingungen jenseits der vier
berücksichtigten Richtungen gibt, wurde die Flugroute der F/A-18 und die daraus resultierende UAP-Route für alle Windrichtungen zwischen 0° und 360° in 1°-Schritten berechnet. Abbildung 13 zeigt die Differenz zwischen der UAP-
Richtung und der Windrichtung in 3.962 m Höhe als Funktion der Windrichtung auf der F/A-18. Jeder
Fall mit Gegenwind, Seitenwind und Rückenwind ist mit den entsprechend farbigen Linien markiert.
Beachten Sie, dass es zwei Winkel gibt, bei denen die Differenz 0° beträgt, was bedeutet, dass sich die UAP genau
mit dem Wind bewegt. Abbildung 14 zeigt die Differenz zwischen der berechneten UAP-Geschwindigkeit, wobei der
Beitrag des Windes zur UAP-Geschwindigkeit in 3.962 m Höhe abgezogen wurde. Diese „intrinsische Geschwindigkeit“ der UAP stellt die Geschwindigkeit dar, die nicht durch den Wind erklärt werden kann, der sie „antreibt“, und von der angenommen wird, dass sie der UAP inhärent ist (z. B. ein Antriebssystem). Die minimale Eigengeschwindigkeit tritt bei Gegenwind auf und die maximale bei Rückenwind. Diese Ergebnisse zeigen, dass die vier betrachteten spezifischen Fälle die geschätzte Leistung des UAP in Bezug auf Geschwindigkeit und Kurs ausreichend einschränken.
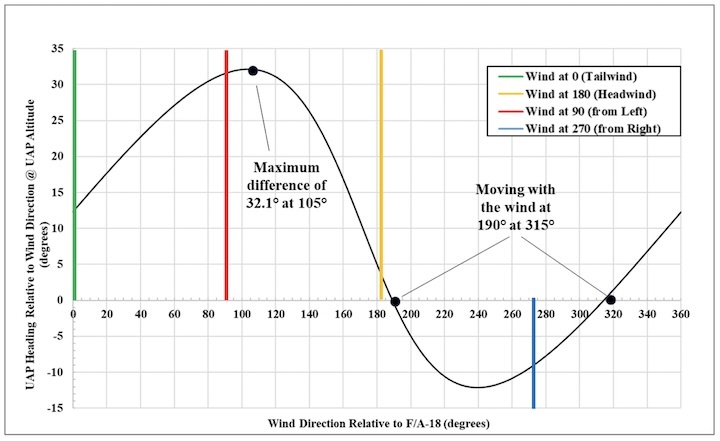
Abbildung 15: Die Werte auf der Y-Achse stellen die Differenz zwischen der Richtung des UAP und der Windrichtung in der Höhe des UAP dar. Die Werte auf der X-Achse stellen die Windrichtung in Bezug auf die F/A-18 dar. Rückenwind,
Gegenwind und Seitenwind sind die farbigen Linien.
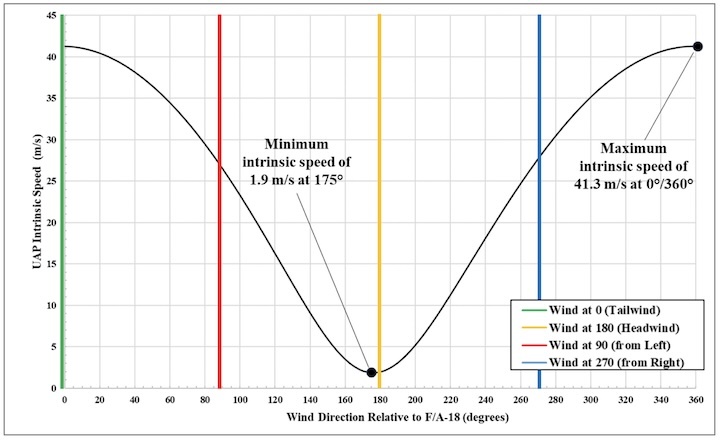
Abbildung 16: Die Werte auf der Y-Achse stellen die Differenz zwischen der Richtung des UAP und der Windrichtung in der Höhe des UAP dar. Die Werte auf der X-Achse stellen die Windrichtung in Bezug auf die F/A-18 dar. Rückenwind,
Gegenwind und Seitenwind sind die farbigen Linien.
Ergebnisse
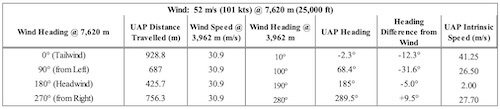
Eine Zusammenfassung der Ergebnisse für die zurückgelegte Entfernung, die Eigengeschwindigkeit und den relativen Kurs in Bezug auf die Windrichtung finden Sie in Tabelle III für die vier betrachteten Richtungsfälle. Die Windrichtung in 3.692 m Höhe, der Höhe des UAP, wurde berechnet, indem 10° zur Richtung in 7.620 m Höhe, der Höhe der F/A-18, addiert wurden (siehe Abbildung 10). Die Windrichtungen in Tabelle III beziehen sich wiederum auf die Position der F/A-18 bei t1.
Tabelle III: UAP-Geschwindigkeit und Kurs unter Berücksichtigung der Windgeschwindigkeit.
Visualisierungen
Um die in Abbildung 11 gezeigten Flugrouten der F/A-18 und die Richtungen in Bezug auf die
Winde in der Höhe zu visualisieren, wurden sie auf einer Karte platziert. Statt relativ zur F/A-18 werden die Windrichtungen nun unter der Annahme definiert, dass der Wind wie berichtet aus 255° wehte. Abbildung 15
zeigt die vier Flugrichtungen auf einer Karte, wobei die F/A-18 an einem beliebigen Ort vor der
Ostküste Floridas platziert ist. Während die Richtungen und relativen Längen der Routen genau sind, dienen die
genauen Standorte und Routenlängen nur zu Visualisierungszwecken.
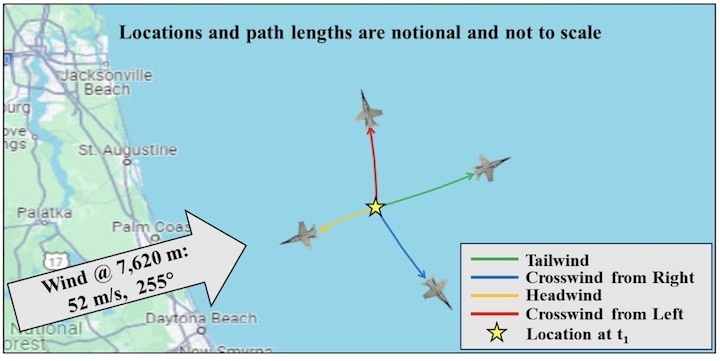
Abbildung 17: Die möglichen Flugrichtungen der F/A-18 basierend auf dem angenommenen Wind in 7.620 m Höhe aus einer Richtung von 255°. Die relativen Längen der Pfade sind repräsentativ für die geflogene Distanz.
Um die Geschwindigkeit und Richtung des UAP zu visualisieren, wurden sie auch auf der Karte vor der Küste Floridas platziert. Die Abbildungen 16-19 zeigen die Position des UAP relativ zur F/A-18 mit zwei Pfeilen: Der schwarze Pfeil ist die Windrichtung auf 3.692 m (die Flughöhe des UAP) und der farbige Pfeil ist die Fahrtrichtung des UAP (nicht der Weg oder die zurückgelegte Entfernung des UAP). Die Längen der Pfeile entsprechen der tatsächlichen (nicht intrinsischen) Geschwindigkeit des UAP (wiederum nicht dem Weg des UAP) und der Windgeschwindigkeit. Pfeile gleicher Länge würden bedeuten, dass die Gesamtgeschwindigkeit des UAP der des Windes entspricht. Pfeile in derselben Richtung bedeuten, dass das UAP in dieselbe Richtung wie der Wind fliegt. Je unterschiedlicher die Längen oder Richtungen der Pfeile sind, desto weniger Einfluss hat der Wind auf die Geschwindigkeit des UAP.
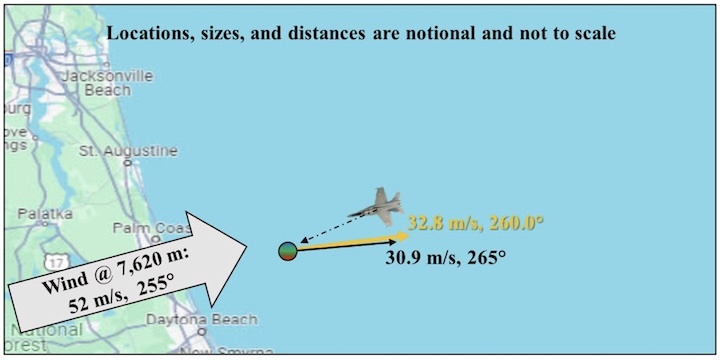
Abbildung 18: Flugrichtung und Geschwindigkeit des UAP bei Gegenwind der F/A-18. Das UAP bewegt sich nahezu in dieselbe Richtung und mit derselben Geschwindigkeit wie der Wind.
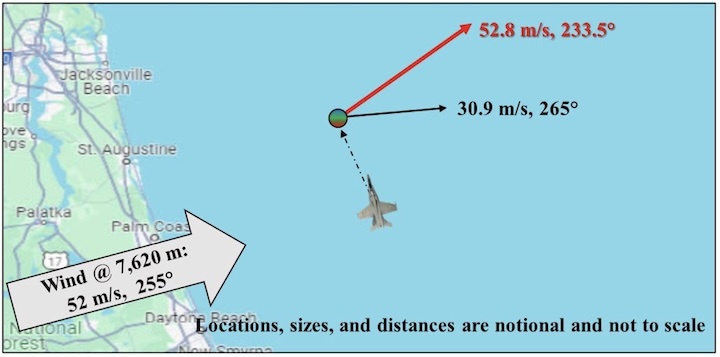
Abbildung 19: Flugrichtung und Geschwindigkeit des UAP bei Seitenwind von der linken Seite der F/A-18.
Das UAP fliegt schneller als der Wind und in nördlichere Richtung.
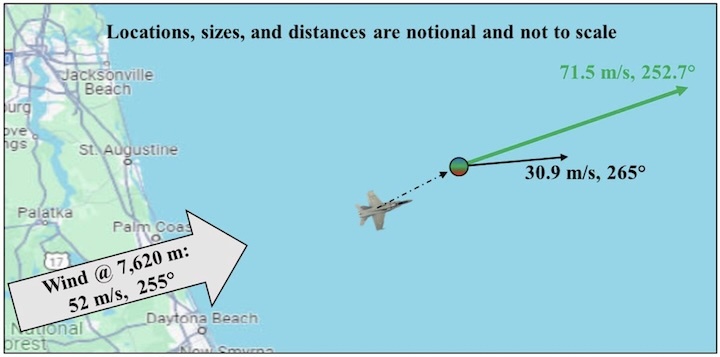
Abbildung 20: Flugrichtung und Geschwindigkeit des UAP bei einer F/A-18 mit Rückenwind. Das UAP fliegt doppelt so schnell wie der Wind in etwa in die gleiche Richtung.
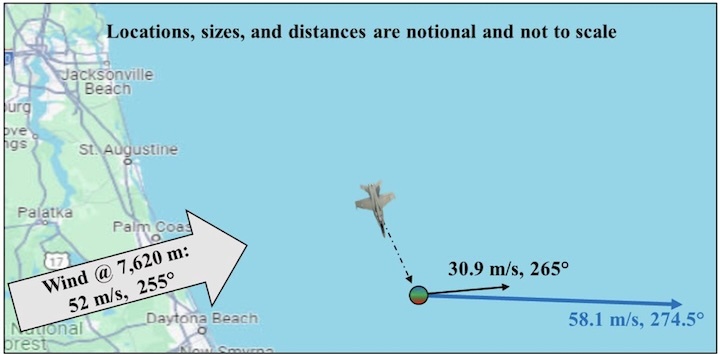
Abbildung 21: Flugrichtung und Geschwindigkeit des UAP bei Seitenwind von rechts der F/A-18.
Das UAP fliegt deutlich schneller als der Wind, aber in nahezu dieselbe Richtung.
Schlussfolgerungen
Die zur Analyse des „Go Fast“-Ereignisses verwendete Methodik wurde aus der Standard-FMV-Analyse abgeleitet und erfolgreich auf Daten angewendet, die manuell aus einem öffentlich verfügbaren .wmv-Video der FLIR-Sensoranzeige einer F/A-18 extrahiert wurden. Die Genauigkeit der Ergebnisse war durch die Präzision und Genauigkeit der Daten und der getroffenen Annahmen bezüglich der Flugparameter der F/A-18 (z. B. die gekrümmte Flugbahn) begrenzt. Berechnungen der genauen Position und des Kurses des UAP waren nicht möglich, da weder die tatsächlichen Spurdaten in Breiten- und Längengrad noch die atmosphärischen Bedingungen bereitgestellt wurden. Daher werden die Schätzungen der Geschwindigkeit und der relativen Bewegungsrichtung verwendet, um die Ergebnisse unter einer Reihe von Bedingungen einzuschränken und so die möglichen Eigenschaften und die Leistung des UAP einzuschränken.
Die Höhe des UAP wurde mit ≈3.962 m (13.000 Fuß) über dem Meeresspiegel ermittelt. Dieses Ergebnis ist sehr zuverlässig, da nur die Ausrichtungswinkel des Sensors und die Entfernung zum Ziel erforderlich waren. Diese Berechnung hängt nicht von der absoluten Position der F/A-18 oder der Windgeschwindigkeit ab. Die Geschwindigkeit und der Kurs des UAP variierten je nach Annahmen über den Weg der F/A-18 im Verhältnis zum Wind in ihrer Betriebshöhe. Bei einem Flug des Flugzeugs gegen einen nominalen Gegenwind wurde festgestellt, dass der Kurs des UAP in seiner Höhe innerhalb von 5° zur Windrichtung lag und <2 m/s (4,5 mph, 3,9 Knoten) schneller als der Wind war. Bei anderen Windwinkeln, die den Flug der F/A-18 beeinflussten, war der UAP bis zu 27,0° von der Windrichtung entfernt und bis zu 40 m/s (89 mph, 78 Knoten) schneller (siehe Tabelle III). Angesichts der Unsicherheiten bei Windrichtung und -geschwindigkeit und den oben genannten Punkten sollten diese quantitativen Ergebnisse nicht wörtlich verwendet werden, sondern nur zur qualitativen Bewertung der UAP-Eigenschaften.
Überlegungen zum Parallaxeffekt
Wenn die F/A-18 gegen den Wind fliegt, wie in Abbildung 16 dargestellt, würden sie und das UAP sich in entgegengesetzte Richtungen bewegen. Bei Windstille bewegt sich das UAP in dieselbe Richtung wie die F/A-18, wenn auch viel langsamer. Diese Situation wird in Abbildung 20 dargestellt. Auf der linken Seite von Abbildung 20 ist eine Seitenansicht des Ereignisses ohne Wind und auf der rechten Seite das Ereignis bei Gegenwind zu sehen. Die gestrichelten Pfeile zeigen jeweils die Start- und Stopppunkte des UAP, die auf die Oberfläche projiziert werden. Die Entfernung zwischen diesen beiden Punkten (rote Pfeile) ist die wahrgenommene Entfernung, die das UAP aufgrund der Parallaxe zurückgelegt hat. Je länger die projizierte Entfernung (roter Pfeil) im Vergleich zur tatsächlich zurückgelegten Entfernung (schwarzer Pfeil) von 3.962 m ist, desto höher ist die wahrgenommene Geschwindigkeit des UAP im Video. Bei Gegenwind und wenn das UAP in die entgegengesetzte Richtung der F/A-18 fliegt, wird dieser Effekt verstärkt und die UAP-Geschwindigkeit erscheint viel höher, was zu einer höheren Wahrscheinlichkeit von Fehlinterpretationen führt.
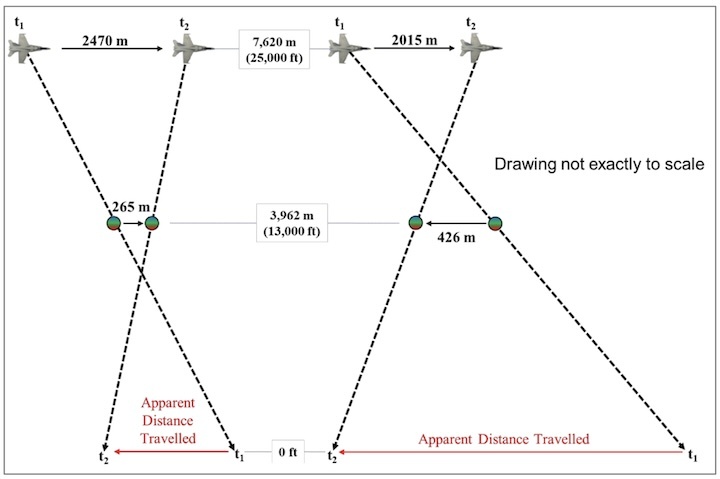
Abbildung 22: Wenn die F/A-18 gegen den Wind fliegt, wird die scheinbar hohe Geschwindigkeit des UAP aufgrund der Parallaxe (rechts) verstärkt, verglichen mit den Ergebnissen bei völligem Wind (links).
Zusammenfassung
Obwohl zum Zeitpunkt des Schreibens dieses Artikels kein vollständiger Datensatz zur vollständigen Berechnung von Standort, Geschwindigkeit und Kurs des „Go Fast“-UAP verfügbar war, ist AARO sehr zuversichtlich, dass das UAP kein anomales oder gar außergewöhnliches Verhalten gezeigt hat. Diese Schlussfolgerung basiert auf den Ergebnissen unserer Analyse der Bandbreite möglicher Szenarien. AARO stellt fest, dass es eine Bandbreite von Winden gibt, bei denen sich das Objekt im Allgemeinen mit Windgeschwindigkeit und in Windrichtung bewegt. Diese grundlegenden GEOINT-Techniken können auf eine Reihe von UAP-Fallstudien angewendet werden und werden in die AARO-Handlung integriert. AARO hat den kurzen Abschnitt des Videos von ungefähr 4233 bis ungefähr 4236 Sekunden analysiert, in dem das Ziel erfasst wurde und die F/A-18 größtenteils waagerecht flog. Die Ergebnisse waren ähnlich wie die hier vorgestellten und ändern die Bewertung nicht, obwohl der kürzere Abschnitt des Videos zu einer höheren Unsicherheit führen kann.
Quelle: All-domain Anomaly Resolution Office AARO