
20.04.2022

Two Russian cosmonauts put on their Orlan spacesuits and headed outside the International Space Station Monday for a spacewalk to begin outfitting a European robotic arm mounted on a Russian science module launched last year, a collaboration that’s been unaffected by souring international relations on Earth.
Cosmonauts Oleg Artemyev and Denis Matveev opened the hatch to the Poisk airlock module at 11 a.m. EDT (1500 GMT) Monday.
The spacewalk was the third in Artemyev’s cosmonaut career, and the first for Matveev. Artemyev, Matveev, and crewmate Sergey Korsakov arrived at the space station last month on a Soyuz spacecraft.
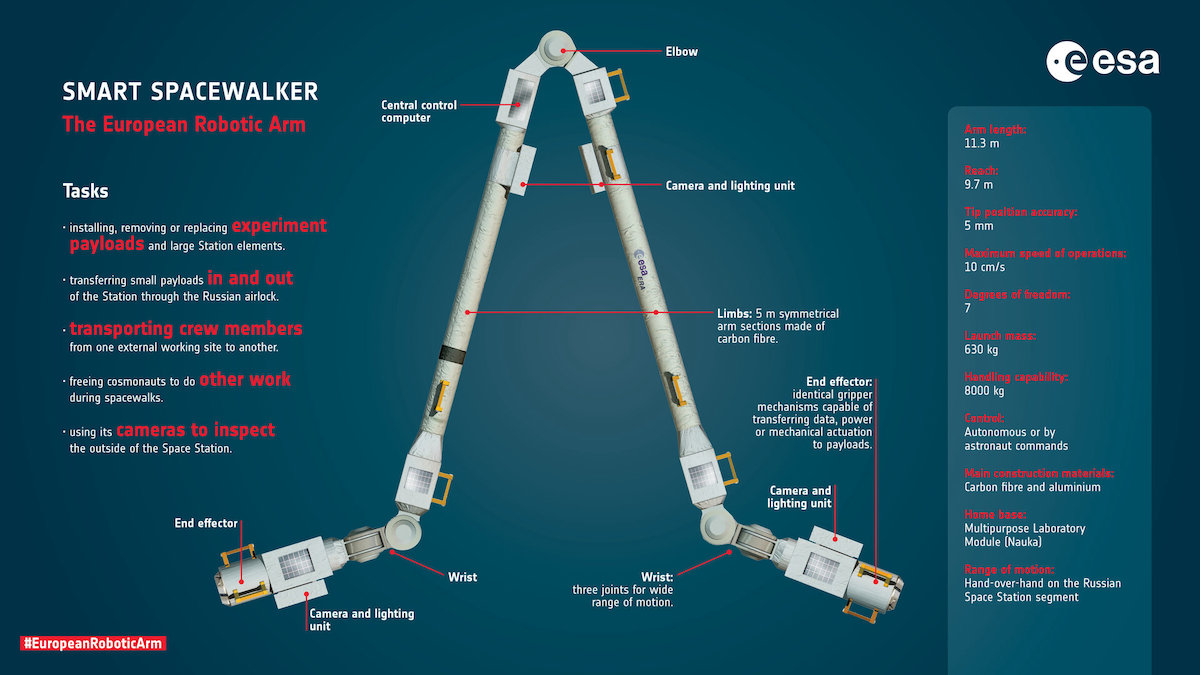
Up to seven spacewalks are planned for their six-month expedition, including work to activate and check out the European Robotic Arm. The arm is a 37-foot-long (11.3-meter) crane-like structure to assist with the movement of external payloads and help astronauts with spacewalks.
The spacewalk Monday was the first of two EVAs, or extravehicular activities, planned this month to begin work with the European Robotic Arm. Another excursion by Artemyev and Matveev is scheduled for April 28.
The excursion Monday was the 249th spacewalk in support of space station assembly, maintenance, and upgrades.

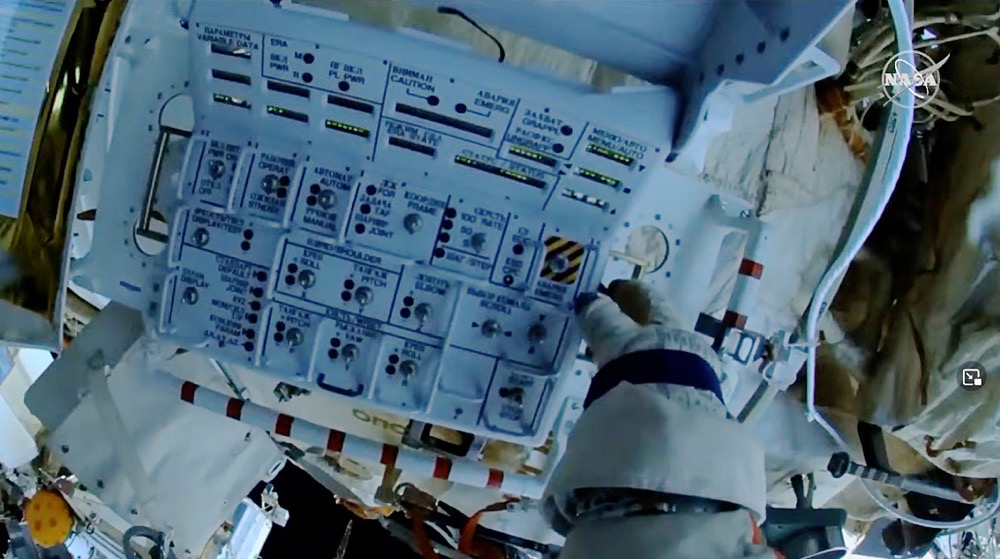
The cosmonauts on Monday’s spacewalk installed and connected a control panel near the robotic arm’s base point, then perform checkouts of the control system, which will be used by spacewalkers to move the arm during future operations. Artemyev and Matveev also removed protective covers from robot arm components, and installed handrails on the Nauka module, which launched with the European Robotic Arm last July.
The spacewalkers completed all their planned tasks Monday, officials said. The spacewalk ended at 5:37 p.m. EDT (2137 GMT), with an elapsed time of 6 hours, 37 minutes.
With its arrival last year, European Robotic Arm joined the Canadian-built arm and a Japanese robot arm at the International Space Station.
Full-scale development of the European Robotic Arm began in 1996, and the arm was in storage more than a decade to wait for Russia’s Nauka lab module to be ready for launch. The European arm was originally planned for launch on a NASA space shuttle.
“ERA is a bit different than the other manipulators that already on the station,” said Philippe Schoonejansm, the European Space Agency’s ERA project manager. “It can be fully preprogrammed in advance, which is helpful. It can be operated from external control panel, which the others do not have. So even when you’re doing a spacewalk, you can control ERA by just seeing and operating this control panel. But also it can operated from inside using only a laptop, so it doesn’t need any joysticks.”
The European Robotic Arm can walk across the Russian segment of the space station. ESA says it’s capable of carrying a load of more than 17,000 pounds, or 8 metric tons, with a precision of one-fifth of an inch (5 millimeters).
A communications problem between a computer on the Russian Zvezda service module and the European Robotic Arm delayed commissioning of the arm after arriving at the space station.
But ESA and Roscosmos, the Russian space agency, are now proceeding with work to prepare the arm for operations. Activities on the International Space Station have been largely unaffected in the aftermath of Russia’s invasion of Ukraine, even as officials have suspended other joint spaceflight programs, such as the European-Russian ExoMars rover.
“We are moving forward with the commissioning and the initial on-orbit validation fo the European Robotic Arm,” said Frank De Winne, ESA’s program manager for the International Space Station.
The technical problems with the communications link between the robot arm and the Russian segment of the station have been solved. “So we have a solid plan together with our Russian colleagues to do the on-orbit validation of the ERA.”
After the initial spacewalks to begin work with the ERA this month, more EVAs are scheduled in the coming months. Those spacewalks may include participation from ESA astronaut Samantha Cristoforetti, who is trained to perform a spacewalk in a Russian Orlan spacesuit.
ESA astronaut Matthias Maurer, currently on the space station, was originally scheduled to conduct a spacewalk in a Russian spacesuit to work with the European Robotic Arm. But Maurer is scheduled to return to Earth later this month, and Cristoforetti is set to launch Saturday with three NASA astronauts on a SpaceX Dragon spacecraft.
“We are pursuing the options still for Samantha to do an EVA related to the European Robotic Arm,” De Winne said.
The European Robotic Arm is now scheduled to be fully commissioned and validated by September or October, De Winne said, a delay of about three or four months from the expected schedule when the arm launched last year.
The Russian spacewalk Monday continued a busy stretch of activity at the space station, where 11 crew members are currently living and working. A four-man private astronaut crew that arrive at the station April 9 is scheduled to undock in their SpaceX crew capsule Tuesday, heading for splashdown off the coast of Florida Wednesday, weather permitting.
The next long-duration crew, including Cristoforetti, will launch from Florida no earlier than Saturday on SpaceX’s Dragon Freedom spacecraft and dock with the station Sunday, replacing a four-person team of astronauts scheduled to depart the station in late April.
Quelle: SN