
20.09.2018
A Japanese Probe Is About to Drop Two Hopping Robots Onto Asteroid Ryugu

Artist's illustration of Hayabusa2's hopping rovers, MINERVA-II1A (back) and MINERVA-II1B (foreground), exploring the surface of the asteroid Ryugu. Both rovers are scheduled to land on Ryugu on Sept. 20, 2018. JAXA
A Japanese asteroid-sampling probe is about to get up close and personal with its target space rock.
The Hayabusa2 spacecraft will drop two tiny rovers onto the asteroid Ryuguthis week, possibly as early as Thursday (Sept. 20), if all goes according to plan.
The Hayabusa2 team began prepping seriously for the epic maneuver last week. The current schedule calls for the mother ship to descend toward Ryugu today (Sept. 19) and for the two little disk-shaped robots, known as MINERVA-II1A and MINERVA-II1B, to deploy as early as tomorrow, U.S. time. (Officials with the Japan Aerospace Exploration Agency, or JAXA, have cited Sept. 20 and Sept. 21 for these events, but that's apparently on Japan time, which is 13 hours ahead of U.S. Eastern Daylight Time.) [Japan's Hayabusa2 Asteroid Mission in Pictures]
Each MINERVA-II rover measures 7 inches wide by 2.8 inches tall (18 by 7 centimeters), with a mass of about 2.4 lbs. (1.1 kilogram). And they won't "rove" in the traditional sense; instead of rolling along on wheels like a Mars or moon explorer, the duo will hop from place to place on Ryugu.
"Gravity on the surface of Ryugu is very weak, so a rover propelled by normal wheels or crawlers would float upwards as soon as it started to move," Hayabusa2 team members wrote in a MINERVA-II1 description. "Therefore, this hopping mechanism was adopted for moving across the surface of such small celestial bodies. The rover is expected to remain in the air for up to 15 minutes after a single hop before landing, and to move up to 15 m [50 feet] horizontally."
The rovers will move autonomously, exploring multiple areas on the surface of the 3,000-foot-wide (950 meters) Ryugu, the update added. The duo will gather a variety of data with their science gear, which includes temperature sensors, optical sensors, accelerometers, gyroscopes and a total of seven cameras that are shared by the two rovers.
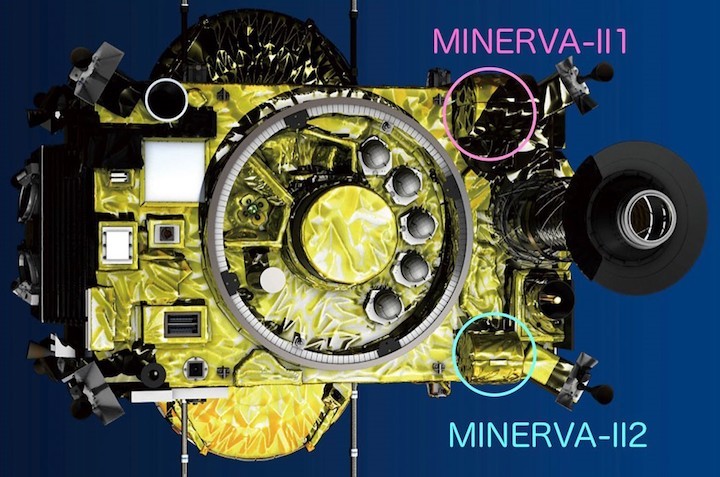
The upcoming touchdowns kick off an extended surface-exploration campaign for the $150 million Hayabusa2 mission, which launched in December 2014 and arrived in orbit around Ryugu on June 27 of this year. Hayabusa2 is scheduled to drop a larger lander called MASCOT onto the asteroid next month, and another little hopping rover, MINERVA-II2, next year.
And the Hayabusa2 mothership will make several forays of its own to the surface next year, grabbing Ryugu material each time. The orbiter will leave Ryugu in December 2019, and its samples will return to Earth in a special capsule a year later.
Scientists will study this returned dirt and rock in detail to learn about the early history of the solar system, and the role asteroids may have played in helping life get going on Earth, mission team members have said.
MINERVA-II stands for "Micro Nano Experimental Robot Vehicle for Asteroid, second generation." The first-generation rover flew aboard the original Hayabusa mission, which arrived in orbit around the asteroid Itokawa in September 2005. In a historic first, Hayabusa returned a tiny sample of Itokawa to Earth in 2010. But its MINERVA hopper did not land successfully on the space rock.
Hayabusa2 isn't the only asteroid-sampling mission operating right now. NASA's OSIRIS-REx probe is closing in on its target, the 1,640-foot-wide (500 m) near-Earth asteroid Bennu. OSIRIS-REx is scheduled to arrive in orbit around Bennu on Dec. 31 and return samples of the space rock to Earth in September 2023.
Quelle: SC
+++
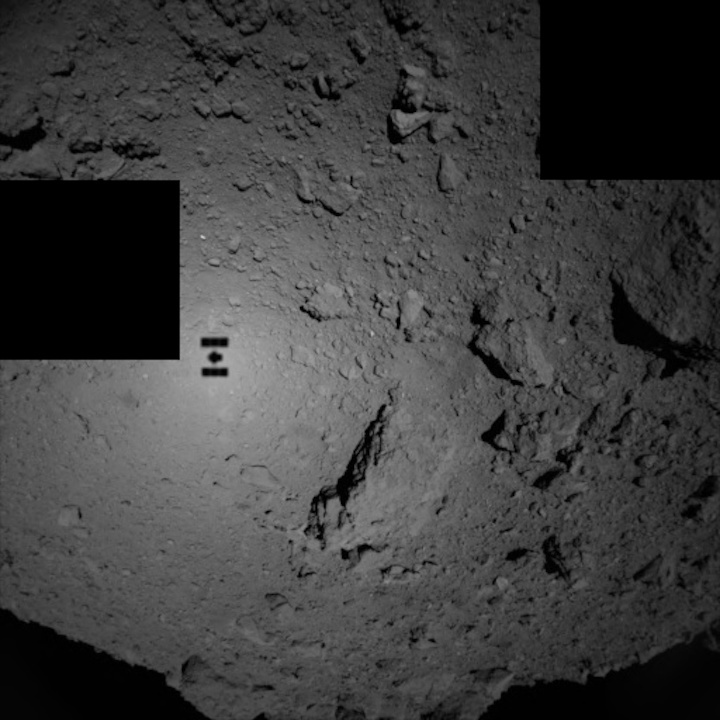
Japan's Hayabusa2 Sees Its Shadow on Asteroid Ryugu in New Photos
n October, Hayabusa2 will deploy its Mobile Asteroid Surface Scout (MASCOT) rover at a zone in the southern hemisphere nicknamed MA-9. During its mission at Ryugu, Hayabusa2 will deploy several rovers and perform some touchdowns itself.
The small dot-like shadow popped up during activities between Sept. 10 and 12, Japanese Aerospace Exploration Agency (JAXA) officials said in a statement. The spacecraft went down to an altitude of nearly 2,000 feet (about 600 meters) and took navigational images with its optical navigation camera.

Credit: JAXA
-
The shadow was created due to a phenomenon called the "opposition effect," JAXA officials said. This happens when the angle between the sun, the surface of a celestial body and the observation point are close to zero. When this situation happens, "the sunlight is behind the spacecraft, casting the shadow on the asteroid," JAXA said.
The opposition effect also showed up in spectacular form when Hayabusa, the predecessor spacecraft to this mission, took a picture of its own shadow in 2005 on asteroid Itokawa. That image clearly showed the spacecraft body, as well as the solar panels that powered Hayabusa.
"If we approach Ryugu still closer, we should see the shadow of Hayabusa2 [as] clearly as with the shadow of Hayabusa," JAXA added. "This may be what we see on our next approach."
The $150 million Hayabusa2 mission arrived at Ryugu on June 27 and is expected to study the 3,000-foot-wide (950 meters) asteroid for 16 months. Hayabusa2 is scheduled to leave Ryugu in December 2019 and return samples to Earth in December 2020.
NASA also has an ongoing asteroid project of its own called OSIRIS-REx(Origins, Spectral Interpretation, Resource Identification, Security, Regolith Explorer). The spacecraft is now on its final approach toward asteroid Bennuand is expected to reach orbit there in December. Like Hayabusa2, OSIRIS-REx will return samples to Earth, but those will come in September 2023.
One large goal of returning asteroid samples to Earth is to help scientists learn about what asteroids are made of, which give clues about the early history and subsequent evolution of the solar system. Space rocks may also have been vital to Earth's life, especially in bringing water, organic materials and other life-friendly ingredients to our planet.
Quelle; SC
---
Update: 21.09.2018
.
Latest image
Real time delivery of the navigation image.
The following list might not show fully processed images due to issues on data transfer and/or processing.



Quelle: JAXA
+++
Operation sequence

- MINERVA-Ⅱ1 schematic showing the deployment operation sequence (©JAXA)
- dV, ΔV:acceleration of the spacecraft
- free fall:The speed of the spacecraft is not controlled, but falls due to the pull of Ryugu’s gravity.
- GCP-NAV:Ground Control Point Navigation, tool for image guided navigation during the descent operation.
- HP:home position
- LIDAR:laser altimeter
- ONC-T:Optical Navigation Camera Telescopic (installed on the bottom of the spacecraft).
- ONC-W1:Optical Navigation Camera Wide angle (installed on the bottom of the spacecraft).
- ONC-W2: Optical Navigation Camera Wide angle (installed on the side of the spacecraft).
- Attitude scan:change the attitude of the probe to photograph MINERVA-Ⅱ1
- constant descent velocity: the spacecraft descends at a nearly constant speed. At first, this speed is about 40 cm/s. From an altitude of about 5km, the speed is about 10 cm/s.
- Trigger Altitude:when this altitude is reached, the spacecraft’s speed will be controlled.
- Additional free fall for preventing plume contamination: the spacecraft will not use thrusters during the period shown in the figure when MINERVA-II1 is in free fall. This is to avoid thruster gas hitting MINERVA-II1.
Quelle: JAXA
+++
[MINERVA-II1] September 21 at 13:35 JST. The separation of MINERVA-II1 has been confirmed! The state of the spacecraft is normal.
Quelle: JAXA
+++
Hayabusa-2: Japan's rovers ready for touchdown on asteroid
wo robotic explorers are descending to the surface of an asteroid.
Japan's Hayabusa-2 spacecraft despatched a pair of "rovers" to the 1km-wide space rock known as Ryugu.
If all goes well, Hayabusa-2 will be the first spacecraft to successfully place robot rovers on the surface of an asteroid.
Rover 1A and Rover 1B will move around by hopping in Ryugu's low gravity; they will capture images of the surface and measure temperatures.
Hayabusa-2 reached the asteroid Ryugu in June this year after a three-and-a-half-year journey.
The 1km-wide space rock known formally as 162173 Ryugu belongs to a particularly primitive type of asteroid, and is therefore a relic left over from the early days of our Solar System. Studying it could shed light on the origin and evolution of our own planet.
The rovers are stored in drum-shaped container at the base of the Hayabusa-2 "mothership". Collectively, they form a 3.3kg science package known as Minerva II-1.

Early on Thursday morning (BST), Hayabusa-2 began descending towards the surface of Ryugu in preparation for the deployment.
At around 0500 BST on Friday (1pm JST) - at a distance from the asteroid of about 60m - Hayabusa-2 initiated the release of the two robots.
Japanese space agency officials said that when the front of the drum is jettisoned into space, the two rovers are then ejected from the container and fall independently to the surface of the asteroid.
The 1kg autonomous rovers move about by hopping, using the asteroid's low gravity. Each one contains a motor-powered internal mass that rotates to generate force, propelling the robot across the surface.
They're equipped with wide-angle and stereo cameras to send back pictures from Ryugu. Spine-like projections from the edges of the hoppers are sensors that will measure surface temperatures on the asteroid.
hey will send back their data to the mothership, which will then relay the information to Earth.
One of the principal concerns for deployment is the rougher-than-expected surface of Ryugu, which is carpeted with boulders with very few smooth patches.
The name Minerva comes from a detachable mini-lander carried on the first Hayabusa spacecraft, which explored a different asteroid - 25143 Itokawa - in the mid-2000s. However, a glitch during the deployment meant that little lander never reached its target.
Officials and scientists from the Japanese Aerospace Exploration Agency (Jaxa), which operates Hayabusa-2, will be hoping for better luck this time.
Hayabusa-2 was launched from the Tanegashima Launch Center in far southern Japan on 3 December 2014. It has been carrying several science instrument payloads for release on to the surface of its target, Ryugu.
On 3 October, the mothership will deploy a lander called Mascot, which has been developed by the German Aerospace Center (DLR) together with the French Space Agency (CNES).
And in late October, Hayabusa-2 will descend to the surface of Ryugu to collect a sample of rock and soil.
Even further on in the mission, Jaxa plans to detonate an explosive charge that will punch a crater into the surface of Ryugu.
Hayabusa-2 would then descend into the crater to collect fresh rocks that have not been altered by aeons of exposure to the environment of space.
These samples will then be sent to Earth for laboratory studies.
The spacecraft will depart from Ryugu in December 2019 with the intention of returning to Earth with the asteroid samples in 2020.
Quelle: BBC
---
Update: 22.09.2018 / 7.30 MESZ
.
Robotic explorers released from Hayabusa2 toward asteroid

JAXA
+++
Latest image
The following list might not show fully processed images due to issues on data transfer and/or processing.

Quelle: JAXA
+++
Update: 12.15 MESZ
,
[MINERVA-II1] September 22 at 15:00 JST. We have confirmed Hayabusa2 has returned to the home position (altitude about 20km) as planned & the spacecraft’s condition is nominal. This completes the operation for the MINERVA-II1 separation. Thank you for your support from everyone!
Quelle: JAXA
+++
Update: 21.00 MESZ
.
We are sorry we have kept you waiting! MINERVA-II1 consists of two rovers, 1a & 1b. Both rovers are confirmed to have landed on the surface of Ryugu. They are in good condition and have transmitted photos & data. We also confirmed they are moving on the surface. #asteroidlanding
+++
This is a picture from MINERVA-II1. The color photo was captured by Rover-1A on September 21 around 13:08 JST, immediately after separation from the spacecraft. Hayabusa2 is top and Ryugu's surface is below. The image is blurred because the rover is spinning. #asteroidlanding



Quelle: JAXA
---
Update: 23.09.2018
.
MINERVA-II1: Successful image capture,
landing on Ryugu and hop!
On September 21, the small compact MINERVA-II1 rovers separated from the Hayabusa2 spacecraft (time of separation was 13:06 JST). The MINERVA-II1 consists of two rovers, Rover-1A and Rover-1B. We have confirmed both rovers landed on the surface of asteroid Ryugu. The two rovers are in good condition and are transmitting images and data. Analysis of this information confirmed that at least one of the rovers is moving on the asteroid surface.
MINERVA-II1 is the world’s first rover (mobile exploration robot) to land on the surface of an asteroid. This is also the first time for autonomous movement and picture capture on an asteroid surface. MINERVA-II1 is therefore “the world’s first man-made object to explore movement on an asteroid surface”. We are also delighted that the two rovers both achieved this operation at the same time.
The following is a picture sent from MINERVA-II1.
Quelle: JAXA
+++
Hayabusa2: Japanese robots land on moving asteroid in world first
Survey on Ryugu asteroid aims to provide answers about the origins of life and solar system
Two robots from Japan’s space agency have landed on a moving asteroid and begun a survey as part of a mission aimed at shedding light on the origins of the solar system.
The rover mission marks the world’s first moving, robotic observation of an asteroid’s surface, according to the Japan Aerospace Exploration Agency (JAXA).
The agency said the round, biscuit tin-shaped robots had successfully landed on the Ryugu asteroid a day after they were released from the Hayabusa2 probe.
“Each of the rovers is operating normally and has started surveying Ryugu’s surface,” JAXA said in a statement on Saturday.
The robots will take advantage of the asteroid’s low gravity, jumping around on the surface – soaring as high as 15 metres (49ft) and staying in the air for as long as 15 minutes – to survey the asteroid’s physical features.
“I am so proud that we have established a new method of space exploration for small celestial bodies,” said JAXA’s project manager, Yuichi Tsuda.
The agency tried but failed to land a rover on another asteroid in a similar mission in 2005.
In October, the Hayabusa2 probe will deploy an “impactor” that will explode above the asteroid, shooting a 2kg copper missile to blast a small crater into the surface.
From this crater, the probe will collect “fresh” materials unexposed to millennia of wind and radiation, hoping for answers to some fundamental questions about life and the universe, including whether elements from space helped give rise to life on Earth.
The probe will also release a French-German landing vehicle named the mobile asteroid surface scout (MASCOT) for surface observation.
Hayabusa2, about the size of a large fridge and equipped with solar panels, is the successor to JAXA’s first asteroid explorer, Hayabusa – Japanese for falcon.
That probe returned from a smaller, potato-shaped, asteroid in 2010 with dust samples despite various setbacks during its epic seven-year odyssey and was hailed as a scientific triumph.
The Hayabusa2 mission was launched in December 2014 and will return to Earth with its samples in 2020.
Quelle: theguardian
+++
JAXA confirms tiny robots from Hayabusa2 landed on asteroid

A photo taken by a tiny robot released by the Hayabusa2 space probe shows the surface of the asteroid Ryugu on Saturday amid splotches of sunlight. | JAXA / VIA KYODO
.
A pair of tiny robots released by the Hayabusa2 space probe touched down Saturday on an asteroid 300 million km from Earth, JAXA said.
The cylinder-shaped Minerva-II1 explorers will take photos and temperature readings on the asteroid Ryugu before the main probe lands, the Japan Aerospace Exploration Agency (JAXA) said.
“Each of the rovers is operating normally and has started surveying Ryugu’s surface,” JAXA said in a statement.
Measuring just 18 cm by 7 cm and weighing roughly 1 kg, the two explorers will travel across Ryugu’s surface by hopping because its gravity is so weak that rolling along the surface is too difficult. If they succeed, the explorers will have conducted the world’s first moving, robotic observation of an asteroid’s surface.
“I am so proud that we have established a new method of space exploration for small celestial bodies,” said JAXA project manager Yuichi Tsuda.
Hayabusa2 was launched in December 2014 to gain clues on the formation of the solar system and the origin of life. It is scheduled to stay on the asteroid for about a year and a half before returning to Earth in late 2020, JAXA said.
Its predecessor, the Hayabusa, returned to Earth in June 2010 after a seven-year journey that took it to the asteroid Itokawa to conduct scientific observations. Hayabusa means peregrine falcon in Japanese.
Next month, the Hayabusa2 will deploy an “impactor” that will explode above the asteroid and shoot a 2-kg copper object into its surface to create a crater a few meters in diameter. The probe will use the crater to collect “fresh” materials unexposed to millennia of wind and radiation in an attempt to glean answers to some fundamental questions about life and the universe, including whether elements from space helped give rise to life on Earth.
The probe will also release a French-German landing vehicle named Mobile Asteroid Surface Scout (Mascot) for surface observation.
Quelle: The Japan Times
---
Update: 24.09.2018
.
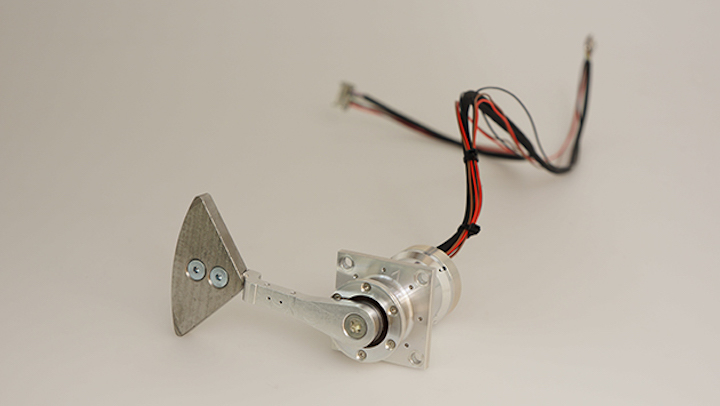
Fortbewegung auf einem unbekannten Himmelskörper
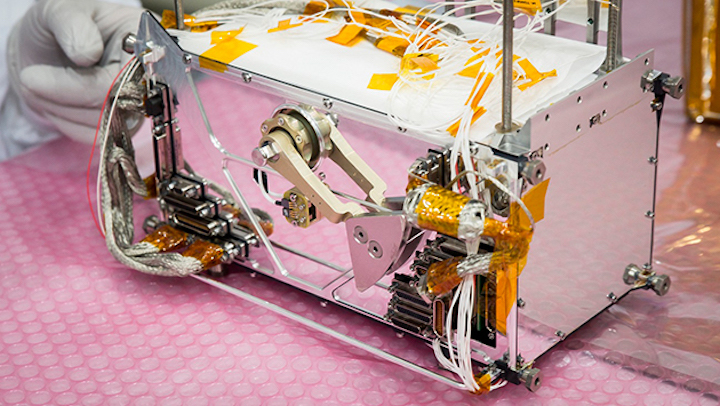
Die Fortbewegung auf Asteroiden und anderen kleinen Körpern ist schwierig, weil die Gravitation und damit auch die Reibung zwischen einem Lander und dem Boden sehr klein sind. Herkömmliche Fortbewegungstechniken mittels Räder oder Ketten basieren auf Traktion durch Reibung und sind daher für Asteroiden ungeeignet. Für MASCOT wurde ein alternativer Mobility-Mechanismus entwickelt, um Fortbewegung in einer solchen Umgebung zu ermöglichen: Innerhalb des Landers befindet sich ein Schwungarm, durch den eine exzentrisch angebrachte Masse beschleunigt und abgebremst wird. Durch die resultierenden Reaktionskräfte wiederum kann sich der Lander vom Boden abstoßen. Da die Gravitation sehr gering ist, können schon kleine Abstoßgeschwindigkeiten große Sprünge herbeiführen: Mit einer Anfangsgeschwindigkeit von 5 cm/s kann MASCOT bereits eine Distanz von 17 m erreichen. Die Fallbeschleunigung auf der Oberfläche von Ryugu beträgt nur 0.00015 m/s2 und ist damit 10.000 Mal kleiner als auf der Erde (9.81 m/s2).
Das Testen dieses Mechanismus auf der Erde gestaltet sich allerdings sehr schwierig: Die traditionellen Methoden zum Testen in Schwerelosigkeit können hier nicht sinnvoll genutzt werden. Bei Parabelflügen ist zwar die durchschnittliche Schwerkraft null, aber es treten hochfrequente Beschleunigungstörungen auf, welche die Testergebnisse signifikant verfälschen. Außerdem müsste die Beschleunigung während der Parabel nicht auf grob null sondern sehr genau auf einen sehr kleinen Betrag wie auf Ryugu eingestellt werden. Das lässt sich flugtechnisch kaum realisieren. Unter Einschränkungen kann man das Szenario aber mithilfe eines Lufttisches am Boden nachbilden: Hier wird das gleiche Prinzip wie beim Airhockey genutzt. Auf dem Tisch können sich luftgelagerte Körper in der Tischebene reibungsfrei bewegen und um die Vertikale rotieren. Durch ein leichtes Neigen des Tisches lässt sich auch eine leichte Gravitation aufbringen. Allerdings ist der Mobility-Mechanismus darauf ausgelegt, bei MASCOT Rotationen in alle drei Richtungen anzuregen: Die zu beschleunigende Masse ist exzentrisch angebracht, damit zusätzlich zu der rotierenden Zentrifugalkraft in der Ebene des Arms auch Drehmomente an den Kanten der MASCOT-Aufstandsfläche auftreten. Dadurch bewegt und dreht sich MASCOT bei jeder Armbewegung in drei Richtungen und verschiebt gleichzeitig seinen Schwerpunkt. Diese Dynamik macht auch irdische Tests schwer durchführbar, bei denen die Gewichtskraft mit einem Helium-Ballon statisch kompensiert würde.
Um die Bewegungen auf dem Asteroiden vorherzusagen, muss man daher auf Software-Modelle und Simulationen zurückgreifen. Es gibt viele verschiedene Modelle, um die Kontaktkräfte zwischen Körpern zu simulieren. Für die Mobility-Simulation wird zu jedem Zeitpunkt die Verschneidung der MASCOT-Box mit der Bodenoberfläche bestimmt und anhand der Tiefe und Geschwindigkeit der Überschneidung eine Kontaktkraft berechnet, die auf einem Feder-Dämpfer-Modell basiert. Allerdings ist es schwer, Parameter wie beispielsweise Steifigkeit oder Dämpfung des Bodens einzustellen, weil es keine Daten über die Beschaffenheit von Asteroiden wie Ryugu gibt. Leider hängt die genaue Bewegung in Mikrogravitation aber sehr stark von diesen Parametern ab, und die Mobility sollte sowohl bei blankem Fels als auch bei einer porösen Oberfläche aus Kieseln funktionieren.
Bei MASCOT wird das Problem wie folgt gelöst: Es werden verschiedene Armbewegungsprofile ermittelt, die für drei unterschiedliche Böden optimiert wurden. Während der Mission probiert der Autonomie-Manager beispielsweise bei einem Aufricht-Manöver diese nacheinander aus. Wenn ein Bewegungsprofil nicht zu einem richtigen Ergebnis geführt hat, wird die für einen anderen Boden passende Aktivität durchgeführt. Nach jedem Manöver wird über die Abstandssensoren auf allen Seiten des Landers geprüft, welche Seite Kontakt zum Boden hat. An den Seiten sind LEDs angebracht sowie Photodioden, die das von der Umgebung reflektierte Licht wieder einfangen. Je stärker das gemessene Signal, desto näher befindet sich der Sensor am Boden oder an einem Hindernis. Zusätzlich hat MASCOT Photozellen, die Sonneneinstrahlung erkennen und somit die Lagebestimmung weiter verbessern. Diese Daten können auch genutzt werden, um nach der Mission die Leistung der Mobility auszuwerten. Auch werden vor und nach jedem Manöver Bilder mit einer Kamera aufgenommen, die indirekt über die dazwischen erfolgte Bewegung der MASCOT-Box Aufschluss geben.

Die zielgerichtete Fortbewegung und Ausrichtung eines Landers auf einem kleinen Körper bleibt eine Herausforderung. Bei der Erforschung von völlig unbekannten Körpern, wie es der Asteroid Ryugu ist, ist es sehr schwer, einen gegen alle Umgebungsbedingungen robusten Mechanismus zu schaffen. Wie MASCOT sich tatsächlich auf der Asteroidenoberfläche bewegen wird – das wird sich im Detail zeigen, wenn er am 3. Oktober von der Raumsonde Hayabusa2 separiert wird, auf den Asteroiden fällt und dort mit seinen vier wissenschaftlichen Instrumenten an Bord für 16 Stunden autonom arbeiten wird.
Quelle: DLR
+++
MINERVA-II1: Successful image capture,
landing on Ryugu and hop!
On September 21, the small compact MINERVA-II1 rovers separated from the Hayabusa2 spacecraft (time of separation was 13:06 JST). The MINERVA-II1 consists of two rovers, Rover-1A and Rover-1B. We have confirmed both rovers landed on the surface of asteroid Ryugu. The two rovers are in good condition and are transmitting images and data. Analysis of this information confirmed that at least one of the rovers is moving on the asteroid surface.
MINERVA-II1 is the world’s first rover (mobile exploration robot) to land on the surface of an asteroid. This is also the first time for autonomous movement and picture capture on an asteroid surface. MINERVA-II1 is therefore “the world’s first man-made object to explore movement on an asteroid surface”. We are also delighted that the two rovers both achieved this operation at the same time.
The following is a picture sent from MINERVA-II1.

Figure 1: Image captured by Rover-1A on September 21 at around 13:08 JST. This is a color image taken immediately after separation from the spacecraft. Hayabusa2 is at the top and the surface of Ryugu is bottom. The image is blurred because the shot was taken while the rover was rotating.
(Image credit: JAXA)

Figure 2: Image captured by Rover-1B on September 21 at around 13:07 JST. This color image was taken immediately after separation from the spacecraft. The surface of Ryugu is in the lower right. The coloured blur in the top left is due to the reflection of sunlight when the image was taken.
(Image credit: JAXA)

- Figure 3: Image captured by Rover-1A on September 22 at around 11:44 JST. Color image captured while moving (during a hop) on the surface of Ryugu. The left-half of the image is the asteroid surface. The bright white region is due to sunlight.
(Image credit: JAXA).
The MINERVA-II1 cameras can shoot in color. In Figure 1, although the image is blurred due to the rover rotating, you can clearly see the body of Hayabusa2 and the paddle of the solar cells. The solar paddle appears blue. In Figure 3, the image was taken during a hop on the surface and you can feel this dynamic movement.
Operation of MINERVA-II1 will continue from now on. We are planning to acquire more data for analysis.
Comments from Project Members
■ Tetsuo Yoshimitsu, Responsible for the Hayabusa2 Project MINERVA-II1.
Although I was disappointed with the blurred image that first came from the rover, it was good to be able to capture this shot as it was recorded by the rover as the Hayabusa2 spacecraft is shown. Moreover, with the image taken during the hop on the asteroid surface, I was able to confirm the effectiveness of this movement mechanism on the small celestial body and see the result of many years of research.
■ Takashi Kubota, Spokesperson for the Hayabusa2 Project (also responsible for the MINERVA-II1)
The good news made me so happy. From the surface of Ryugu, MINERVA-II1 sent a radio signal to the Earth via Hayabusa2 S/C. The image taken by MINERVA-II1 during a hop allowed me to relax as a dream of many years came true. I felt awed by what we had achieved in Japan. This is just a real charm of deep space exploration.
■ Yuichi Tsuda, Hayabusa2 Project Project Manager
I cannot find words to express how happy I am that we were able to realize mobile exploration on the surface of an asteroid. I am proud that Hayabusa2 was able to contribute to the creation of this technology for a new method of space exploration by surface movement on small bodies.
■ Makoto Yoshikawa, Hayabusa2 Project Mission Manager
I was so moved to see these small rovers successfully explore an asteroid surface because we could not achieve this at the time of Hayabusa, 13 years ago. I was particularly impressed with the images taken from close range on the asteroid surface.
Hayabusa2 project
2018.09.22
Quelle: JAXA